农业机械化论文

引言
在大型林木种苗的培育系统中,环境参数( 如室内温度、湿度、光照强度以及 CO2含量等) 都需要进行实时监控,这就要求温室控制系统具有自动化、网络化和便于操作等优点。传统的温室控制系统一般采用 RS485 总线系列,成本高,传输距离有限。WLAN是一种新型的无线传输系统,其具有高速、高效、经济、覆盖范围广、经济性比较强等优点。本文将无线通信技术运用到林木温室的自动化作业平台中,并结合数值仿真模拟技术成功地实现了温室内 CO2的自动化调节过程,得到了温室环境的温度、湿度、CO2含量等分布情况,实现了温室育苗的自动化作业。
1 林木温室机械自动化作业平台概述
随着机械数控技术的发展,通过 PLC 编程控制可以实现很多自动化作业,如林木育苗过程的自动化。
无线通信技术是当前应用得比较多的自动化控制技术,通过它可以将检测信号直接传输到控制中心,由控制中心发出控制指令对电机机械操作,从而实现各种自动化作业过程,如图 1 所示。
图 1 中,无线控制作业过程主要是通过无线传输WLAN 和自动化控制设备来完成的,无线控制作业的输出设备为机械手。具体操作流程如图 2 所示。【图1略.图2】
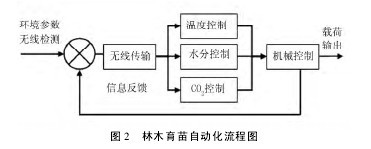
工作时,通过无线检测技术对温室的林木生长环境进行无线检测,将无线检测得到的信号加入到数值模拟的边界条件中进行仿真计算,得到温室的环境参数分布情况; 对温室参数分布情况进行分析,对计算机自动控制发出指令,操作机械手实现温室育苗过程的自动化作业。
2 温室育苗机械自动化控制数学模型研究
在温室林木育苗过程中,需要采用机械自动化的方式对温室的温度、湿度以及 CO2量进行控制。在自动化实现过程中,首先要进行信息的采集,本文主要运用无线通信技术对环境参数进行检测。在信息采集完毕之后,自动化控制过程主要采用的是机械导轨和机械手装置,通过导轨滑动实现空间自动化,通过机械手实现环境参数的调控。机械自动化装置示意图如图 3 所示。【图3】
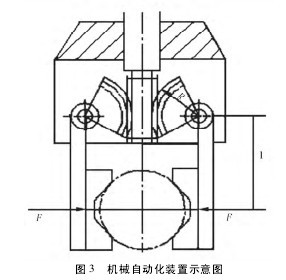
根据图 3 可以得到装置的驱动力为【1-2】
其中,θ 表示手指的角度; φ 表示旋转方位角。
装置的实际驱动力为【3】

由于传动过程中有损耗,所以将机械传动效率确定为 0. 94,而 K 的取值可表示为【4】

机械装置的设计主要是活塞运动的设计,其中需要施加的活塞力可以表示为【5】

其中,F1表示活塞杆推力; F2表示反作用于弹簧的力; F3表示气缸的总的阻力; P 表示气缸的总压力。反作用于弹簧的力可以用下列公式计算,即【6】

其中,x 表示活塞行程,Gf表示弹簧的刚度。【7】

其中,d2表示弹簧直径; D2表示弹簧平均直径; i表示弹簧的圈数; G 表示弹簧的弹性模量。考虑机械效率的影响,则【8-9】
3 林木温室育苗自动化控制数值模拟研究
本文以实际温室林木育苗过程为研究对象,对林木温室育苗的自动化进行了数值模拟和实验研究。图 4 为林木温室育苗实际模型图。【图4.略】
本文选用松木等生长适应性比较强的林木作为研究对象,将林木在温室中进行自动化培育,培育过程运用无线检测技术对温室环境进行检测。为了实现温室的自动化控制,以数值模拟的方式进行仿真模拟建模,通过将边界条件输入模型的方式来调控温室内温度、湿度以及 CO2的变化。建立的温室二维模型截面示意图如图 5 所示。【图5】
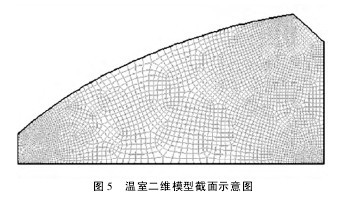
为了准确地模拟温室内的环境参数,本文选用结构化四边形网格,并对边界进行加密,网格划分总数为 12 万个。
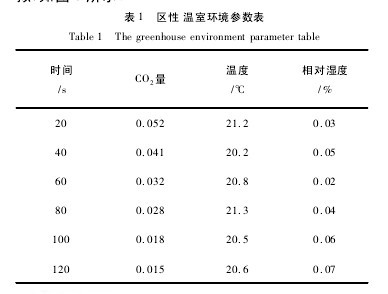
表 1 为通过无线检测技术检测到的温室环境参数结果。由表 1 可以看出,温室的温度、相对湿度以及 CO2的含量随着时间的变化而变化。其中,温度和湿度对于林木育苗的温度比较适合,但是 CO2的浓度不合理。为了对温室育苗 CO2的浓度进行自动化控制,使用 FLUENT 软件对 CO2浓度进行了数值仿真模拟,如图 6 所示。【表1.图6略】
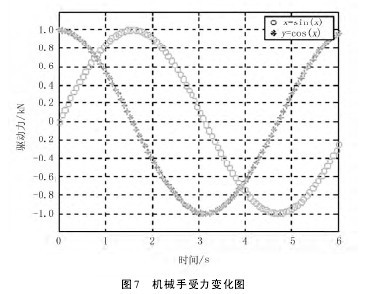
由图 6 可以看出,不同部位 CO2的浓度有所不同,没有均匀分布。为了保证 CO2含量的均匀分布,需要通过导轨对 CO2排放装置进行移动控制,并通过机械手控制 CO2的排量。图 7 为机械手受到的驱动力作用变化图。由图 7可以看出,机械手受到的力成正弦曲线或者余弦曲线变化。通过对驱动力的自动控制,便可以实现林木温室育苗的自动化控制。
通过对 CO2排列的自动化控制,最终得到了 CO2随时间变化曲线,如图 8 所示。由图 8 可以看出,在前 50s 内,CO2的含量逐渐减低,不利用林木苗的生成; 通过自动化控制之后,CO2的量随时间逐渐增加,实现了林木的自动育苗过程。【图7-8】
4 结语
结合数值仿真模拟技术,运用先进的机械自动化技术设计了林木苗的自动化作业平台,通过对温室环境的调节,实现了温室作业的自动控制。首先对林木苗的自动化控制系统进行了概述,分析了系统的构成以及无线通信技术的应用。同时,根据自动化过程中机械手的驱动力和导轨的驱动力设计了自动化作业平台的数学模型,并通过计算得到了驱动力的理论公式。最后,通过对 CO2的自动化调节实现了温室生长环境的自动化控制,并得到了温室环境参数分布以及CO2含量控制曲线,从而为林业技术的研究提供了理论参考。
参考文献:
[1] 陈加浪,陈大跃,何科奭,等. 单栋塑料大棚在高温低风速下的自然通风数值研究[J]. 农机化研究,2011,33( 8) : 19-22.
[2] 程秀花,毛罕平,倪军. 基于 CFD 的自然通风玻璃温室湿热环境模拟与测试[J]. 扬州大学学报: 农业与生命科学版,2011,31( 3) : 90-94.
[3] 蒋国振,胡耀华,刘玉凤,等. 基于 CFD 的下沉式日光温室保温性能分析[J]. 农业工程学报,2011,27( 12) : 275-281.
[4] 蒋国振,胡耀华,刘玉凤,等. 下沉式日光温室湿度调控的数值分析[C]/ /中国农业工程学会 2011 年学术年会论文集. 北京: 中国农业工程学会,2011.
[5] 刘珊. 被动式日光温室热湿环境模拟与实验研究[D]. 济南: 山东建筑大学,2010.
[6] 黄国艺,黄发. 广西阳朔至鹿寨公路项目使用林地可行性报告[R]. 南宁: 广西壮族自治区林业勘测设计院,2010.

引言犁耕作业是现代农业生产中必不可少的生产过程,目前常用的翻耕机具主要有铧式犁及圆盘犁等。铧式犁具有良好的翻垡覆盖性能,为其他耕地机具所不能及。铧式犁也是世界农业生产中历史悠久、应用最广泛的耕地机械。大多数铧式犁只能单方向翻垡,翻垡后会...
在环太湖区域有一种用于农田灌溉的自航式农用输水泵船,俗称流动泵站,其上的动力配备为柴油机,如6135。当需要航行时,通过合上离合器挡位Ⅰ,使尾轴及螺旋桨旋转;当需要抽水排灌时,通过合上离合器挡位Ⅱ,使齿轮组及水泵运转,从河道中抽水,再借助于...
引言目前,全国大中型农场已基本实现农业机械化。以黑龙江垦区为例,垦区现有9个农场管理局、113个国有农牧场,农业机械总动力近600万kW,拥有农用大中型拖拉机4.5万台、大中型配套农具11万台、机动水稻插秧机6万台多、谷物联合收获机械1万...
0引言智能化小区播种机的研制提高了小区播种机的工作精度和工作效率,既保证了育种试验的准确性和科学性,也有利于降低试验成本和提高作物育种试验的效率[1].为了提高小区播种机的智能化水平,节省人力资源和时间,提高工作效率,研究了小区作业图自动生成系统....
引言能源与环境两大难题对人类今后发展造成了不可估量的压力:一方面,能源作为全球经济发展最为重要的动力将在不久的未来消耗殆尽;另一方面,传统能源在日常使用中给全世界人民带来了各种污染。生物质能是太阳能以化学能形式贮存在生物质中的能量形式,...
引言作为一个农业大国,我国农业面临着农业体系庞大、人口不断增长、农产品供给安全等问题。我国部分的农业种植仍维持在靠天吃饭、人力改良有限的阶段,拥有大面积土地的种植户已逐渐向机械化种植转变,而以国有农场为代表的种植集体,已经开始向农业现代化...
引言我国目前超过2/3的蔬菜栽培采用育苗移栽的方式,工厂化育苗的方式主要有穴盘育苗、容器育苗及水培育苗等,且以穴盘育苗为主[1-4]。穴盘播种是育苗的关键环节之一。传统的穴盘播种以人工点播为主,存在劳动强度大、播种效率低、播种周期长及播种...
引言我国西南地区的地形以丘陵、山地为主,土地狭小零碎分散,土壤类型及植被多种多样,缺乏机耕道,农机田间转移极为不便。这一地区田间耕作机械化的发展迄今为止大致经历了两个阶段。在20世纪90年代以前,田间耕作主要由人畜力完成,手扶拖拉机犁耕...
0引言提高戈麻打叶过程脱叶率、减少发动机功率消耗是设计戈宝麻采叶机所必须考虑的问题.戈宝麻全身是宝,是野生高级纤维植物,是生长在我国北方盐碱、沙荒地和河滩地的一种抗逆性很强的多年生宿根草本植物.其适应范围广,根蘖能力强,易形成块状连片植物群落,...
0、引言长久以来,我国广泛采用传统的翻耕技术,然而许多发达国家的研究和实践都表明:传统翻耕在带来好处的同时会造成更大的危害,需要引起注意。例如,翻耕这种单一的耕作方法会加剧土壤的风蚀与水蚀,容易破坏地表植被。另外,许多国家因为过度的翻耕导致了土...