农业机械化论文

0 引言
我国是土地荒漠化严重的国家之一,荒漠化面积达 27. 32% ,已成为威胁我国环境及国民生存的严重问题,而植树造林、种草恢复植被是防治荒漠化的最有效手段[1- 2].因此,要想解决我国土地荒漠化问题,提高森林覆盖率,改善生态环境,必须大力开展机械化植树造林[3].
针对植树作业机械化相关装备,国内外相关机构开展了大量研究,研究的主要植树作业装备类型有挖坑机、连续开沟式植树作业机等.其中,挖坑机主要有液压挖坑机、悬挂挖坑机[4]、手提挖坑机[5]、挖穴机、深栽造林钻孔机[6 -7]等机械装备; 连续开沟植树作业机有 JZX-30 型悬挂式植树机和 KDZ 型开沟大苗植树机等[8-10].以上机械中,挖坑机械主要适用于小面积的山地、坡陡、石头多等场合的植树造林; 连续开沟式作业机械能够实现植树的机械化连续开沟及栽植作业,但其作业质量不高.为此,项目组在前期多功能植树机研究的基础上,通过改进设计与优化,研制出了集双开沟、投苗、覆土、镇压、滴灌带铺设等功能于一体的滚动夹苗植树机.
1 整机结构及工作原理
1. 1 整机结构
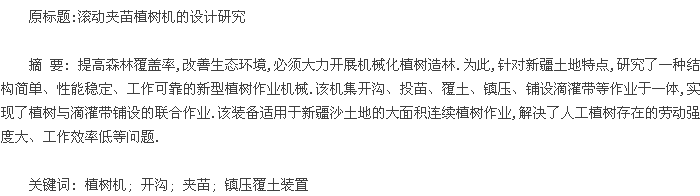
该机主要由机架、液压升降装置、开沟犁、栽树开沟器、投苗装置、镇压装置、覆土装置及滴灌管铺设装置等组成,如图 1 所示.
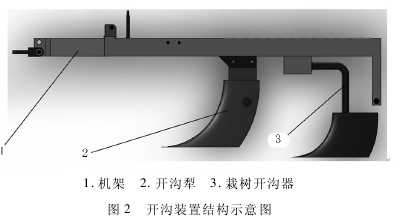
滚动夹苗植树机主要技术参数如表 1 所示.
1. 2 工作原理
工作时,装备由拖拉机驱动,通过装备开沟犁对作业田地实施开宽且浅沟作业,栽树开沟器随即在开好的沟中完成深且窄的栽树树沟作业; 工作人员从苗架上取出树苗,并将其放在取苗装置上的固定夹板与活动夹板中间,活动夹板在弹簧的作用下夹紧树苗,当树苗随着取苗装置转动到脱苗板处时,活动夹板碰到脱苗板,树苗下落到开好的栽树沟中; 随即由呈圆锥形的培土轮将树沟两侧的土培到树沟里,并由镇压轮对所培土进行压实,由呈凹形圆盘的覆土轮对新栽树苗进行覆土作业,使树苗达到技术要求的拔苗力;最后,由滴灌带铺设装置完成滴灌带的铺设工作,通过导向滑轮将滴灌带正确的铺设在相应位置.整机的作业深度由液压升降机构实施控制,通过划行器为下一次植树作业提供正确的路线.
2 关键零部件设计
本文所研究的多功能植树机采用悬挂式结构,主要机构包括机架、开沟装置、镇压覆土装置、地轮及滴灌带铺设装置等部分.
2. 1 开沟器设计
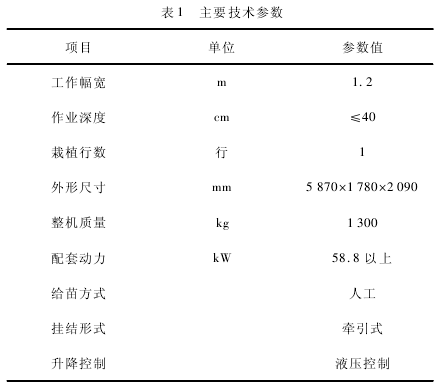
开沟器是植树机能否完成植树作业的关键部件之一,主要要求为能够实现植树作业过程中开深且窄的植树沟,开沟后土壤回流少,以利于植树作业的顺利完成.为此,设计了双开沟装置,具体方案为: 开沟犁对作业田地实施开宽且浅沟作业,栽树开沟器随即在开好的沟中完成深且窄的栽树树沟作业.
实践证明: 设计完成的开沟器开出的沟深浅一致,沟形整齐平直并且窄而深,开沟器结构紧凑,克服了现有开沟装置体积大、阻力大等不足.
开沟器主要由机架、开沟犁、栽树开沟器等组成.其中,开沟犁用于完成宽且浅的开沟作业,栽树开沟器用于完成深且窄的开沟作业,双开沟器有效保证了苗木栽种质量,如图 2 所示.
2. 2 投苗装置设计
投苗装置由链条传动,传动比为 1.在链节上装有连接板,连接板上有固定板和活动板,活动板铰接在连接板上,并通过弹簧与之连接; 在自然状态下( 即未夹持树苗时) ,弹簧处于自然状态,活动板与固定板平行; 当夹持树苗时,弹簧压缩,将树苗夹紧.
工作过程中,由链条转动带动树苗在夹苗盘上进行转动,当转动至脱苗位置时,活动板与另一端固定起挡板作用; 在链条转动的作用下产生一定的力,从而活动板克服弹簧力打开,树苗下落至开好的植树沟中,由培土轮进行培土,从而完成树苗的夹持、输送及脱苗过程.投苗装置结构如图 3 所示.
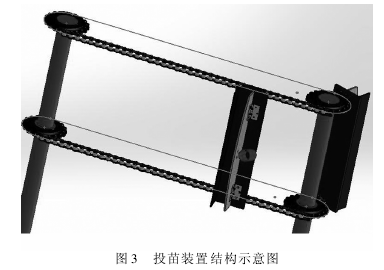
根据作业要求,株距确定为 1 ~3m,作业速度为 2~ 6km / h.依靠人机工程要求,确定投苗速度为 5s /棵.链条上装有 6 棵树苗,每棵树苗间距 120mm,由此可得: 投苗速度 V1= 120 / ( 5 ×1 000) = 0. 024m / s,链轮转速 W=V1/ r = 57. 6r / min,拖拉机行走速度 V2= V1+( 1 ~ 3) /5.计算可得,速度范围为 0. 864 ~ 2. 25km/h.通过对比分析,在链轮的转速为 57. 6r / min 时,选择流量为 400mL/r 的摆线液压马达.由此可得,在满足机器工况下,液压马达总排量为
q = 1 000Qn1n2n3/ n
式中
Q-泵的理论流量( L/m) ;
n-输出轴转速( r / min) ;
n1-泵的容积效率,柱塞泵 n1= 0. 96 ~ 0. 97,齿轮泵 n1= 0. 88 ~ 0. 9;
n2-控制阀的容积效率,n2= 0. 985 ~ 0. 995;
n3-液压马达容积效率,摆线液压马达为 0. 97~ 0. 98;
代入各参数,可得
q = 1 000Qn1n2n3/ n = 6. 57mL / r
马达的输出扭矩为
M = 0. 159△Pqη = 333. 9N·m
因此,投苗轴即输出轴功率为
P1= Pη1= 2. 52kW
转速 n1= n / i = 5 7 . 6 /1 = 5 7 . 6 r / min; 转 矩 T1= 9 550P1/ n1= 418N·m; 作用链轮上的力 Ft= 2T1/ d1= 10 830N.其中,d1为链轮的分度圆直径,d1= 77. 2mm.
由此,可以确定轴的最小直径为 dmin= A0( P1/ n1) /3 = 25. 6mm.其中,A0取 112; 轴的材料选取为 45 钢,调质处理.
2. 3 镇压装置设计
镇压装置[3]主要完成苗木栽植后土壤的镇压,以保证所栽植苗木具有良好的拔苗力,其作业质量对于苗木的成活率影响严重.
本文通过综合分析不同类型及材料镇压轮特性,最终采用刚性镇压轮方案,有效保证了装备良好的镇压效果[6].在其作业过程中,通过弹簧压力的调整实施镇压轮对土壤的压力大小调整; 弹簧压力的可调整性,保证了镇压轮与地面的有效接触,并且可适应不同土地作业的要求.
镇压轮宽度 B2取 100mm,直径取 440mm,压强取400N / m,则有
P = K·Z^n
式中 P-单位面积压力;
K-常数;
N-数值与土壤性质有关,取 N = 0. 5.
计算可得,下陷深度 Z=23. 74mm.
进一步推导可知,在保证压强 4N/cm²的条件下,弹簧预紧力 F 为
F = PRB2arccos( R-Z / R) -W = 99. 4N
式中 R-镇压轮半径;
W-镇压轮重.
2. 4 铺设滴灌带装置
滴灌带铺设装置主要由支撑架、卷轴和引导管等部件组成,如图 4 所示.
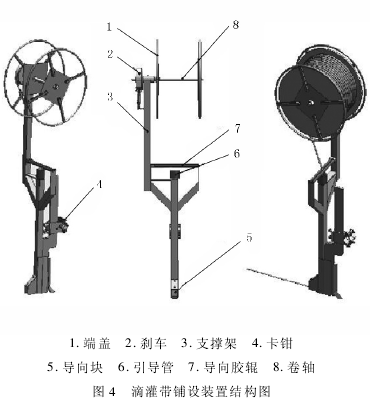
工作过程中,滴灌带带卷安装在卷轴上,并通过导向胶辊及引导管,最终由导向块引出; 当拖拉机牵引前行时,滴灌带一端固定于地头,带卷在滴灌带的拉力作用下实现滴灌带的铺设.
3 生产试验与结果分析
该机设计完成后,对装备开沟器、覆土镇压装置、滴灌带铺设装置进行试验,结果表明: 装备生产率高,作业小时生产率可达 1. 8hm²/ h; 树苗栽植深度大于30 cm; 拔苗力可达 100 N; 装备液压控制装置升降灵活可靠,滴灌带铺设装置可在植树作业的同时有效实施滴灌带铺设任务.
4 结语
1) 通过对植树机开沟装置、镇压覆土装置及滴灌带铺设装置等进行设计,完成了集开沟、取苗、覆土镇压及滴灌带铺设等功能于一体的植树作业机械,实现了植树作业的机械化.
2) 采用夹持机构和脱苗机构为一体的取苗装置,取代了传统的人工投苗,保证了林木的株距一致性,减少了操作工的劳动强度.
3) 该装备的研究开发为提高我国植树造林全程机械化生产水平和林业生产附加值提供了技术与装备的支撑.
参考文献:
[1] 武广涛. 超声技术用于选择式植树机智能植苗作业的研究[D]. 北京: 北京林业大学,2006.
[2] 刘晋浩,王丹. 谈国内外人工林抚育机械的现状及发展趋势[J]. 森林工程,2006,5( 3) : 13-14.
[3] 蒙贺伟,李进江,坎杂,等. ZS-45 多功能植树机的研制[J]. 农机化研究,2013,35( 1) : 83-85.
[4] 于建国,屈锦卫. 国内外挖坑机的研究现状及发展趋势[J]. 新疆农机化,2007( 1) : 45-46.
[5] 马波. 高效多用装载机[J]. 农家致富,2007( 2) : 23.
[6] 武广涛,余国盛,李美华. 国内造林机械及其发展前景[J]. 林业机械及木工设备,2003( 11) : 4-5.
[7] 董丽梅,吴建民. 山地播种机的研究与设计[D]. 兰州: 甘肃农业大学,2009.
[8] 李春高. 我国造林机械的现状及发展趋势[J]. 林业机械与木工设备,2012( 10) : 4-6,10.
[9] 肖冰,周大元,张丽平,等. 我国营林机械的发展( 三) -抚育机械设备[J]. 林业机械与木工设备,2011( 2) : 8-12,20.
[10] 李树森,朱赞彬,曾剑锋,等. 采伐迹地植树机的设计及其开沟器的应力分析[J]. 农机化研究,2013,35( 5) : 123-126.

引言犁耕作业是现代农业生产中必不可少的生产过程,目前常用的翻耕机具主要有铧式犁及圆盘犁等。铧式犁具有良好的翻垡覆盖性能,为其他耕地机具所不能及。铧式犁也是世界农业生产中历史悠久、应用最广泛的耕地机械。大多数铧式犁只能单方向翻垡,翻垡后会...
在环太湖区域有一种用于农田灌溉的自航式农用输水泵船,俗称流动泵站,其上的动力配备为柴油机,如6135。当需要航行时,通过合上离合器挡位Ⅰ,使尾轴及螺旋桨旋转;当需要抽水排灌时,通过合上离合器挡位Ⅱ,使齿轮组及水泵运转,从河道中抽水,再借助于...
引言目前,全国大中型农场已基本实现农业机械化。以黑龙江垦区为例,垦区现有9个农场管理局、113个国有农牧场,农业机械总动力近600万kW,拥有农用大中型拖拉机4.5万台、大中型配套农具11万台、机动水稻插秧机6万台多、谷物联合收获机械1万...
0引言智能化小区播种机的研制提高了小区播种机的工作精度和工作效率,既保证了育种试验的准确性和科学性,也有利于降低试验成本和提高作物育种试验的效率[1].为了提高小区播种机的智能化水平,节省人力资源和时间,提高工作效率,研究了小区作业图自动生成系统....
引言能源与环境两大难题对人类今后发展造成了不可估量的压力:一方面,能源作为全球经济发展最为重要的动力将在不久的未来消耗殆尽;另一方面,传统能源在日常使用中给全世界人民带来了各种污染。生物质能是太阳能以化学能形式贮存在生物质中的能量形式,...
引言作为一个农业大国,我国农业面临着农业体系庞大、人口不断增长、农产品供给安全等问题。我国部分的农业种植仍维持在靠天吃饭、人力改良有限的阶段,拥有大面积土地的种植户已逐渐向机械化种植转变,而以国有农场为代表的种植集体,已经开始向农业现代化...
引言我国目前超过2/3的蔬菜栽培采用育苗移栽的方式,工厂化育苗的方式主要有穴盘育苗、容器育苗及水培育苗等,且以穴盘育苗为主[1-4]。穴盘播种是育苗的关键环节之一。传统的穴盘播种以人工点播为主,存在劳动强度大、播种效率低、播种周期长及播种...
引言我国西南地区的地形以丘陵、山地为主,土地狭小零碎分散,土壤类型及植被多种多样,缺乏机耕道,农机田间转移极为不便。这一地区田间耕作机械化的发展迄今为止大致经历了两个阶段。在20世纪90年代以前,田间耕作主要由人畜力完成,手扶拖拉机犁耕...
0引言提高戈麻打叶过程脱叶率、减少发动机功率消耗是设计戈宝麻采叶机所必须考虑的问题.戈宝麻全身是宝,是野生高级纤维植物,是生长在我国北方盐碱、沙荒地和河滩地的一种抗逆性很强的多年生宿根草本植物.其适应范围广,根蘖能力强,易形成块状连片植物群落,...
0、引言长久以来,我国广泛采用传统的翻耕技术,然而许多发达国家的研究和实践都表明:传统翻耕在带来好处的同时会造成更大的危害,需要引起注意。例如,翻耕这种单一的耕作方法会加剧土壤的风蚀与水蚀,容易破坏地表植被。另外,许多国家因为过度的翻耕导致了土...