农业机械化论文

引言
目前普遍使用的香蕉秸秆处理方法是在收获香蕉后采用人工砍伐和挖掘,将香蕉秸秆搬到田边路旁堆放或运走进行焚烧。该方法劳动强度高,耗费大量的人力,而且香蕉树与香蕉头堆放到田边占用很大场地,减少了耕地的利用率,且严重污染香蕉园内外的生态环境。通过使用脱水香蕉秸秆破碎机,可有效解决劳动力不足问题,降低工人劳动强度,提高工人劳动舒适性和劳动生产率,减轻废物和废气对人体的危害、提高资源再回收利用率,增加果农收益,保证庄园的环境卫生,适合低碳环保、可持续发展的要求。
1 自动秸秆粉碎机的方案设计
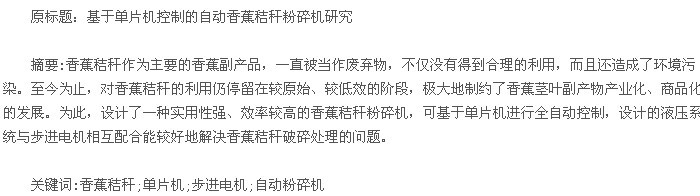
粉碎机主要由步进电机系统、液压控制系统及粉碎系统等组成。其中,步进电机、液压系统是最主要的机械部分。步进电机系统主要完成送料过程,并且配合液压系统完成香蕉秸秆的切割。液压系统将秸秆切割为预先设计好的长度,最后送进粉碎系统,完成整个粉碎过程。香蕉秸秆粉碎机的工作原理简图如图 1 所示。【图1】
工作流程如下: ①电机。油泵转动,工作回初始位置。②进料。绿色信号灯点亮的时候,通过步进电机运动将原料通过传送带向下一个工作平台传送,直至红色信号灯点亮停转。③切割。由光电传感器传来信号,闸刀工作,将香蕉秸秆切断。④粉碎。切断后秸秆自动落入粉碎箱,电机启动开始粉碎。⑤自动卸载。
当闸刀切割后回到初始位置绿灯亮,步进电机开始运作。上述②至⑤连续进行,即完成香蕉秸秆粉碎的工作过程。2 步进电机控制系统步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。当驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,控制脉冲个数来控制角位移量,从而达到准确定位的目的; 同时,可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
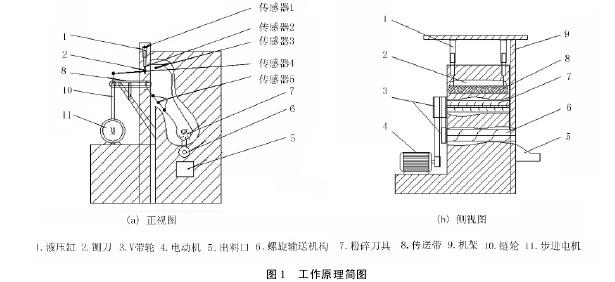
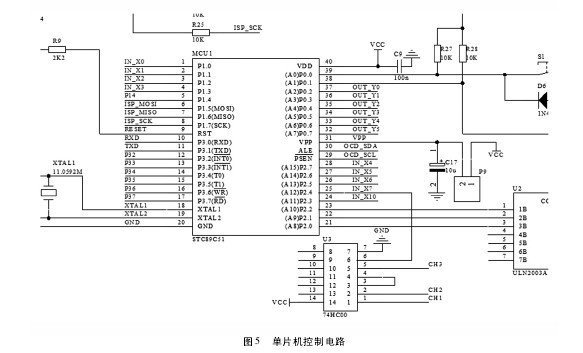
步进电机在本自动系统中通过单片机的控制完成送料。通过传感器 4 的检测向单片机发出信号,单片机接收信号后发出脉冲驱动步进电机; 步进电机转动,运送香蕉秸秆到达指定位置后,传感器 3 检测到物体后断电,步进电机停止转动。此时,闸刀切割香蕉秸秆,香蕉秸秆被切断,闸刀恢复初始位置时刻,传感器 1 发出信号,步进电机开始转动,并且重复以上过程,单独设置步进电机开关,以便更好地操作。步进电机控制部分电路如图 2 所示。【图2】
3 液压控制系统
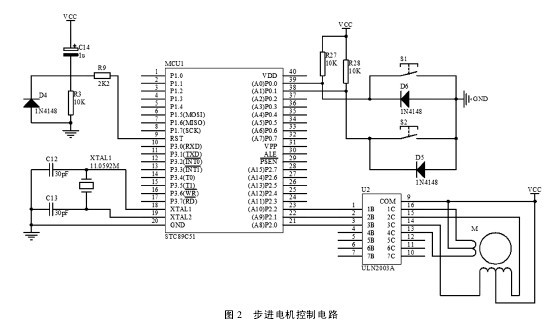
液压系统由信号控制和液压动力两部分组成,信号控制部分用于驱动液压动力部分中的控制阀动作。
当步进电机运送香蕉秸秆到达传感器 2 时( 见图 1) ,传感器 2 发出脉冲,根据秸秆的高度液压控制闸刀的高度以便香蕉秸秆通过闸刀口; 当步进电机将秸秆运送到传感器 3 时,步进电机停转,闸刀切割; 闸刀切割后恢复到初始位置,传感器 1 发出脉冲,步进电机运转。液压系统的控制部分示意图如图 3 所示。【图3】
4 粉碎机系统
4. 1 粉碎机
由图 1 可知,原料被切割过后自动进入了粉碎桶中。由压力传感器检测到压力后发出脉冲,粉碎机开始运转,并且通过螺旋输送机构自动将粉碎后的秸秆传送入装置 9 中; 当传感器组的所有传感器都有感应,通过与非芯片 74HC00 单片机发出信号,步进电机停止转动。
4. 2 传感器组
当原料被送入粉碎桶的时候,粉碎机开始工作,传感器组用于检测粉碎桶中原料的容量; 当传感器组的所有传感器都检测到信号则由与非门 74HC00 芯片向单片机发出信号( 见图 5,其中引脚 CH1、CH2、CH3分别是图 1 中传感器组中的 3 个传感器) ,单片机随即控制步进电机停转; 传感器组与传感器 1 都没有信号时,总电源断电,粉碎机停止工作。
5 系统软件设计
5. 1 系统程序流程
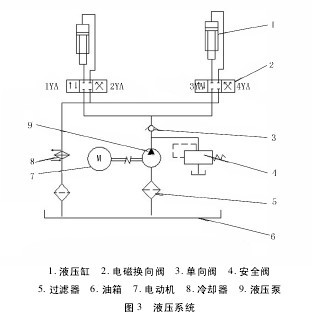
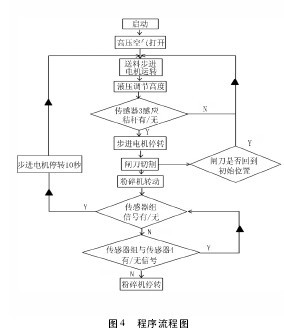
香蕉秸秆粉碎机是一套全自动控制工作的设备,每一步的运行都是基于上一步的结果或者后续步骤的完成信号,所以整个结构联系紧密,前后不可分离。系统的程序流程图如图 4 所示。【图4】
5. 2 基于单片机的控制系统
单片机的控制电路是结合反相器 ULN2003A 芯片、与非门 74HC00 芯片以及 STC89C51 芯片的功能构成的电路。在控制过程中,传感器就是开关,单片机接收传感器以及其他芯片发来的信号并对信号做相应的处理。通过此组合系统能够存储和执行指令,进行逻辑运算、顺序控制、定时、计数和算术运算等操作,得以完成秸秆粉碎机的运算控制操作。
为了实现香蕉秸秆粉碎机的自动控制,单片机采用控制电路组成的系统进行控制。其 I/O 接线顺序功能图如图 5 和图 6 所示。
转换条件和输出分别表示如下:
X0: 启动开关。控制整个电路的电源。
X1: 高压空气开关。吹扫台面、粉碎桶,保持装置中无杂物。
X2: 光电传感器 4。检测原料有无,控制步进电机工作。
X3: 高度传感器 2。检测秸秆的高度,调节闸刀的高度。
X4: 光电传感器 1。检测闸刀是否恢复初始位置,控制步进电机工作。
X5: 光电传感器 3。检测秸秆有无,控制步进电机工作。
X6: 独立步进电机工作开关。
X7: 传感器组。检测粉碎箱秸秆有无,控制步进电机工作; 。
X10: 停止开关。【图5-6】
6 结语
本项目基于单片机、步进电机、液压系统等设计,可有效缓解劳动力不足、降低工人劳动强度、提高工人劳动舒适性和劳动生产率、减轻废物和废气对人体的危害、提高资源再回收利用率、增加果农收益、保证庄园的环境卫生,符合低碳环保、可持续发展的要求。经机器加工后的脱水香蕉秸秆可转变为新型能源,用作养殖饲料、生产食用菌的基料以及工业原料。
参考文献:
[1] 杨华,许继宏. 香蕉副产品的净化处理与综合利用[J]. 云南农业科技,2006( 4) : 62-64.
[2] 吴建明. 粉碎节能理论与辊压机[J]. 国外金属矿选矿,1993( 10) : 36-42.
[3] 郝静,张凯,赵卫兵. 锤击式破碎机的结构及主要参数设计[J]. 农机化研究,2009,31( 11) : 165-168.
[4] M. D. 弗拉维尔. 碎磨回路的设计和装备[M]. 北京: 冶金工业出版社,1990.
[5] 马少健,陈炳. 辰颚式破碎机破碎物料影响因素的研究[C]/ /第四届全国粉体工程学术会议论文集. 北京: 中国选矿学会粉体工程学委会,1996.
[6] 孙成林. 破碎机的新发展( 待续) [J]. 硫磷设计与粉体工程,2001( 3) : 34-40.
[7] 孙成林. 破碎机的新发展( 续完) [J]. 硫磷设计与粉体工程,2001( 4) : 14-16.

引言犁耕作业是现代农业生产中必不可少的生产过程,目前常用的翻耕机具主要有铧式犁及圆盘犁等。铧式犁具有良好的翻垡覆盖性能,为其他耕地机具所不能及。铧式犁也是世界农业生产中历史悠久、应用最广泛的耕地机械。大多数铧式犁只能单方向翻垡,翻垡后会...
在环太湖区域有一种用于农田灌溉的自航式农用输水泵船,俗称流动泵站,其上的动力配备为柴油机,如6135。当需要航行时,通过合上离合器挡位Ⅰ,使尾轴及螺旋桨旋转;当需要抽水排灌时,通过合上离合器挡位Ⅱ,使齿轮组及水泵运转,从河道中抽水,再借助于...
引言目前,全国大中型农场已基本实现农业机械化。以黑龙江垦区为例,垦区现有9个农场管理局、113个国有农牧场,农业机械总动力近600万kW,拥有农用大中型拖拉机4.5万台、大中型配套农具11万台、机动水稻插秧机6万台多、谷物联合收获机械1万...
0引言智能化小区播种机的研制提高了小区播种机的工作精度和工作效率,既保证了育种试验的准确性和科学性,也有利于降低试验成本和提高作物育种试验的效率[1].为了提高小区播种机的智能化水平,节省人力资源和时间,提高工作效率,研究了小区作业图自动生成系统....
引言能源与环境两大难题对人类今后发展造成了不可估量的压力:一方面,能源作为全球经济发展最为重要的动力将在不久的未来消耗殆尽;另一方面,传统能源在日常使用中给全世界人民带来了各种污染。生物质能是太阳能以化学能形式贮存在生物质中的能量形式,...
引言作为一个农业大国,我国农业面临着农业体系庞大、人口不断增长、农产品供给安全等问题。我国部分的农业种植仍维持在靠天吃饭、人力改良有限的阶段,拥有大面积土地的种植户已逐渐向机械化种植转变,而以国有农场为代表的种植集体,已经开始向农业现代化...
引言我国目前超过2/3的蔬菜栽培采用育苗移栽的方式,工厂化育苗的方式主要有穴盘育苗、容器育苗及水培育苗等,且以穴盘育苗为主[1-4]。穴盘播种是育苗的关键环节之一。传统的穴盘播种以人工点播为主,存在劳动强度大、播种效率低、播种周期长及播种...
引言我国西南地区的地形以丘陵、山地为主,土地狭小零碎分散,土壤类型及植被多种多样,缺乏机耕道,农机田间转移极为不便。这一地区田间耕作机械化的发展迄今为止大致经历了两个阶段。在20世纪90年代以前,田间耕作主要由人畜力完成,手扶拖拉机犁耕...
0引言提高戈麻打叶过程脱叶率、减少发动机功率消耗是设计戈宝麻采叶机所必须考虑的问题.戈宝麻全身是宝,是野生高级纤维植物,是生长在我国北方盐碱、沙荒地和河滩地的一种抗逆性很强的多年生宿根草本植物.其适应范围广,根蘖能力强,易形成块状连片植物群落,...
0、引言长久以来,我国广泛采用传统的翻耕技术,然而许多发达国家的研究和实践都表明:传统翻耕在带来好处的同时会造成更大的危害,需要引起注意。例如,翻耕这种单一的耕作方法会加剧土壤的风蚀与水蚀,容易破坏地表植被。另外,许多国家因为过度的翻耕导致了土...