ũҵ��е������

����0�� ����
��������ƽ��������߹��ˮ��������,��ũ���ˮ��������Ҫ��ʩ֮һ�����ü����ֱ��,����һ���������,����ʵ��ũ������ƽ�����������еõ���Ӧ�á�����,�ü��������ڽ�С��ģũ��ؿ��ڵر������̫������ؾ�ϸƽ��,������ǿ�⡢��������������Ӱ�졣2005 ��,������ҿ�ʼ�� GPS ����Ӧ�õ�ũ��ƽ����ҵ�о��С�GPS ƽ�ؼ������о��ȸߡ����������������Ӱ��С���ŵ�,�����Ѿ��������Ʒ��������ʵ��Ӧ��; ����۸��ԭ��,δ�����ҹ��ƹ�Ӧ�á�
����Ϊ��,���������չ�����ز�Ʒ������,��ƿ����˻��� GPS ��ƽ��ϵͳ,��������ƽ������,ȡ���˽Ϻõ�����Ч����
����1�� GPS ƽ��ϵͳ����ԭ��
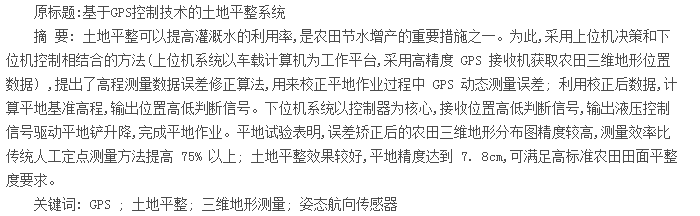
����GPS ƽ��ϵͳ��Ҫ����������GPS ���ջ������ؼ����������������̬��������Һѹϵͳ��ƽ�ز����豸�Ȳ������,��ͼ 1 ��ʾ��
��
��������ƽ����ҵ֮ǰ,������Ҫ�Դ�ƽ���ؿ������ά���β���,Ϊ��ƺ�����ũ��ƽ��ʩ�������ṩ����֧�֡���ʻ����������һ��·����ʻ,���ؼ����ͨ�� GPS ���ջ�ʵʱ��ȡũ�ﲻͬλ�õľ�γ�����꼰�߳�,�������ݽ��з����봦��,����õ����߳�,��ƽ����Ƹ̡߳����,���ؼ������ʵʱ�߳�����߳̽��бȽ�,�ж�λ�øߵ�,��ͨ����������Һѹϵͳ�����Ӧ�����ź�,����ƽ�ز�������
��������ƽ����ҵ������,��Ҫ��ƽ����ؿ��ٴν�����ά���β���,����ƽ��ǰ��ƽ��Ч���Ա�,��ƽ������������ƽ��Ч���Լ�����ƽ�����Ƚ��ж������ۡ�
����2�� ϵͳӲ�����
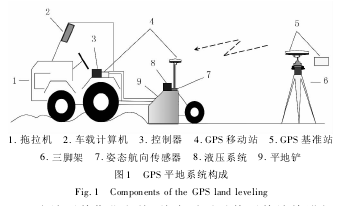
�������о�������λ�����ߺ���λ���������ϵķ���������,��λ��ϵͳ�Գ��ؼ����Ϊ����ƽ̨,��Ҫ���� GPS ���ݵĻ�ȡ�봦��,���λ�øߵ��ж��ź�; ��λ��ϵͳ�Կ�����Ϊ����,ͨ��ʵʱ������λ��λ���ж��ź�,����ƽ�ز����ƽ����ҵ��ϵͳ��ͼ,��ͼ 2 ��ʾ��
����2. 1 GPS ���ջ�
����GPS ���ջ��� GPS ƽ��ϵͳ����Ҫ�����豸,������վ���ƶ�վ��������̨ 3 ���֡�����ʱ,�ƶ�վʵʱ��ȡ GPS ������������λ�õ� RTK ��ֶ�λ��Ϣ,�õ���ȷ����άλ����Ϣ�����о�ѡ������ Trimble ��˾������ Trimble5700���ջ��豸,���� RTK ��ַ�ʽ���ж�λ����,��̬��λ���ȿɴ�������
����2. 2 ��̬������
���������������ƽ����ҵʱ,�����ϴ�,ʹ�ù̶���ƽ�ز��ϵ� GPS ���ζ��ϴ�,������ GPS �������,��λ�����½��ϴ�Ϊ��,������̬�뺽������ GPS λ����Ϣ����У��,��� GPS ��λ���ȡ���̬�뺽������װ��ƽ�ز����� GPS �����ٽ���λ�á����о���ѡ�ú��� Xsens ��˾������ MTI -AHRS ����̬�뺽�������ô��������������ǡ�У��������ٶȺͽ��ٶȡ�
����2. 3 ���ؼ����
�������ؼ������Ϊ���ݴ����ն�,���� GPS �������ݵIJɼ����������洢,������λ�����λ�øߵ��ж��źš�ϵͳѡ�ù��ػ���Ϊ���ؼ����(�ͺ� AFL -12A - N270,������ǿ) ,���� Windows XP ����ϵͳ,���� RS232 ������ GPS ���ջ�����������������ͨ�š�
����2. 4 ������
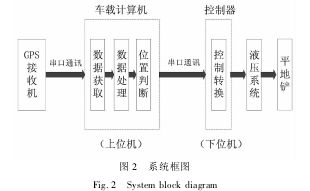
�����������������Գ��ؼ��������������ź�,���źŽ��� D/A ת����������·����Һѹϵͳ,��������ƽ�ز����������������Ĺ���,��ͼ 3 ��ʾ��
����ͼ 3 ��,���������� STC89C52 �͵�Ƭ��Ϊ������оƬ,ͨ�� RS232 ���ڽ�����λ��(���ؼ����) ��������λ�øߵ��ж��ź�,��ͨ��ָʾ��ʵʱ��ʾ��ͬʱ,ͨ��������·,������Ӧ��ƽ��ģ������źŸ�Һѹ����ϵͳ,ʵ��ƽ�ز�������������������ͨ������ʵ���ֶ����Զ�����ģʽ: ���ֶ�ģʽ��,ֻ��ʵ���ֿ�ƽ�ز�������; ���Զ�ģʽ��,������λ��ƫ���ź��Զ�����ƽ�ز�����,Ҳ����ʵ���ֶ����ơ�
����
����2. 5 Һѹϵͳ
����GPS ����ƽ���豸��Һѹϵͳ����ִ�п����������ָ��,��������ƽ�ز���������ϵͳƽ����ҵʱ������������Һѹ���������
����2. 6 ƽ�ز�
����ƽ�ز�ͨ��������������,����ʻ��������Һѹϵͳ����������,ʵ�ֶ���ũ�������������ƽ�����ƺ���䡣����ƽ����ҵʱũ����������IJ�ͬ,���Է�Ϊˮ��ƽ�ز��ͺ���ƽ�ز����֡�ͼ5 ��ʾΪ���о����õĺ���ƽ�ز���
����3�� ϵͳ�������
����3. 1 �������
������λ�������Գ��ؼ����Ϊ����ƽ̨,�� Win-dows ����ϵͳ��,���� Microsoft Visual C + + 6. 0 ������������,��Ҫʵ�� GPS ������ȡ��ת������������У��,�Լ����̵߳ļ��㡣
����3. 1. 1 GPS ���ݸ�ʽת��
�������ؼ����ͨ�����ڻ�ȡ GPS ���ջ�����Ķ�λ����,���õ��� WGS -84 �������ϵ,��Ҫת��Ϊ��Ӧ��ƽ��ֱ������(X,Y,Z)��Ŀǰ,�������ͨ�����ø�˹ - ������(Gauss - Kruger) ͶӰ����,��Ƹ�˹ͶӰ����������㷽���μ����ס�
����3. 1. 2 �����
�������ƽ����ҵ�����в����� GPS �������,ͨ��MTI - AHRS ��̬�������������Ϣ�� GPS λ����Ϣ����У��,���㹫ʽΪ

��������,x��y��z Ϊȷ������λ������; Xα��Yα��ZαΪ GPS �������ά����; φ ��θp��θr�ֱ�Ϊ��̬����������ĺ���ǡ������ǡ������; a��b��h �ֱ�ΪGPS ��������ά������ 3 �������ͶӰ���������ĵľ��롣E-1φ θpθ()r���Ա�ʾΪ

����ͨ����ѧ��������У��������,���þ���ͳ��ѧ������һЩ����С���쳣�߳����ݡ����ڲ������ݽ϶�,�ɽ��ƿ���������̬�ֲ��������Ŷ� 1 - α= 95% �������,���ù�ʽ(3 ) ������߳����ݵ�������ֵ��������ֵ,��

��������,x-Ϊ�̲߳�������ƽ��ֵ; σ Ϊ�̲߳��������������; z Ϊ�ɲ����; n Ϊ�̲߳������ݸ�������ʽ(1) ��ʾ,�������� (x-- ��,x-+ ��) ��������,���������������������,����

�������ü�Ȩƽ���������Ը̲߳������������ݽ��������������ؿ鰴��һ���ij��Ȼ��ֳɵȱ߳���դ��(�� 1m × 1m,1. 5m × 1. 5m,2m × 2m,2. 5m × 2.5m ��) ������,��������դ����ص���Ϊ 0. 5m�����ݸ��߳�Ӱ��ĵؿ��Ȩ��,���ò�ͬ��Ȩֵ�������ص����ڵĸ߳�����Ȩ��ȡ 2,���ڷ��ص����ڵĸ߳�����Ȩ��ȡ 1,���ÿ��դ���ڵļ�Ȩƽ��ֵ��Ϊդ���ڵ����ո߳�����,���㹫ʽΪ
����3. 2 �������
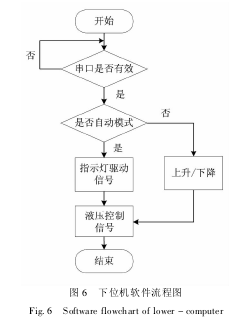
������λ�������Ե�Ƭ��Ϊ����ƽ̨,��ͼ 6 ��ʾ��
�����ϵ���������ʼ����,����λ����������λ���ź���Ч,���ж��û�ѡ������Զ�ģʽ�����ֶ�ģʽ: ������ֶ�ģʽ,��ֱ����Ӧ�˹���/��Һѹ�����ź�; ������Զ�ģʽ,��������������λ���źŽ��д���,���Һѹ�����źź�ָʾ�������źš�
����4�� ���������
����4. 1 ���鷽��������
����Ϊ���� GPS ����ƽ��ϵͳ���������Ч��,�ڱ����к�������ׯ��(��γ 40°,���� 116°����) ������ƽ����ҵ������ؿ�Ϊ 30m ×120m ��ũ��,�ر���������ϴ� GPS ���ջ���վ�̶���ũ�︽��������,�ƶ�վ����������̬�������̶���������ƽ�ز���,ͨ���������߸߶�(�������ľ������Ĵ�ֱ�߶�) ,����ת���õ������������Ը̡߳����ؼ���������������̶�����������ʻ���ڡ����鲽������:
����1) ��ƽ��ǰ�ؿ�����˹��������������Ƥ�߲���ƽ���ؿ�߽�,���6m ×6m ����,�ؿ��ڹ�����5 ×21 ������㡣���ø߾���ˮ�Dz����������Ը߳�,������ Trimble 5700 GPS ���ջ���̬������γ��,�ɷֱ�ﵽ�����������������ȡ�
����2) ��ƽ��ǰ�ؿ���г��� GPS ��̬�������رտ�����,��ʻ�������� 0. 3m/s ���ٶ��ڴ��������ڽ�������ʽ����,GPS ���ݲɼ�Ƶ��Ϊ 1Hz��
����3) ƽ����ҵ��������,��ʻ������ǣ��ƽ�ز���������ظ�������ʻ·������,ƽ�ز��ڸ����,��������,�������ƽ����ҵ��
����4) ������Ρ�ƽ����ҵ��Ϻ�,�ظ��� 2 ) ��3 )��,��ƽ����ĵؿ��ٴν����˹���������ͳ���GPS ��̬������
����4. 2 ������������
�������� GPS ��ά���ζ�̬�������˹�����������ַ�ʽ�ĵ��β������ݾ����������:�˹����������ʽ���ɼ� 126 ����,�� 4 ��ͬʱ������ʱ 4h; ���� GPS �������ɼ� 850 ����,���˼�ʻ����,��ʱ 50min,�����Ч�ʸ���,�ɼ������ܶȸ������� Golden Software ��˾ Surfer ����,���˹�����������ݡ����� GPS ��ά���ζ�̬����ԭʼ�����Լ�У��������,�ֱ���ά����ͼ��
�����ɿ���,У��ǰ���ض�̬������ά����ͼ�кܶ�ļ�״ͻ��,����������������ʻ������ GPS���߶����ȽϾ���,��ʹ���������г��ֲ����������ݡ�������̬У���Լ���������㷨����֮��Ķ�̬������ά����ͼ���˹����������ά����ͼ���кܺõĿռ�һ���ԡ�ƽ�غ����ͼ��
�������Կ���,ƽ����ҵ��ũ���������ȼ�С,�ؿ�ƽ����������ߡ�
����4. 3 ƽ��Ч������
������ƽ��ǰ��ĸ߳����ݽ���ͳ�Ƽ���,���ƽ��ǰ��ĸ̱߳������߳���� 8cm ��Χ�ڵIJ���������̲߳������,��� 1 ��ʾ��
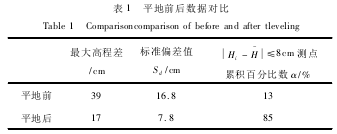
�����ɱ� 1 ���Կ���,����ؿ�����̲߳���ƽ��ǰ�� 39cm �½��� 17cm,��ƫ��ֵ�� 16. 8cm �½���7. 8cm,����ĸ̲߳����С��≤8cm ����ۻ��ٷֱ��� �� 13%������ 85%,����ũ�����ƽ���̶ȵķֲ�����õ��˽ϴ�ĸ��ơ�
����5�� ������
�������ļ����з��� GPS ����ƽ��ϵͳ,�ȿ�ʵ��ũ����ά���ο��ٲ���,Ҳ��������¶�Ҫ������ؾ�ϸ����ƽ����ҵ,Ϊ�ҹ�Ӧ�����ƹ���� GPS ��ƽ�ؼ����ṩ��һ��ϵͳ�Ľ�������������������������,ϵͳ�����ȶ�,���� GPS ��ά���ζ�̬������ʽ����˹������������,����Ч����� 75% ���ϡ�
����ƽ�����ũ��̱߳�ƫ��Ϊ 7. 8cm,���Բ�ֵ�� 8cm ��Χ�ڵIJ��ռ 85% ,������ũҵ���߱�ũ��ƽ����Ҫ��δ�����о�����,�������ڻ��� GNSS ����,��������ƽ���������豸�ijɱ�,���ũ�����̲߳�������,���ӵ���������Ӧ���ƹ���,�з������ҹ�����ı���ʵ�ʲ�����ũ������ƽ��ϵͳ��
���������:
����[1] ˮ����ũ��ˮ��˾. ��ˮ���[M]. ����: �й�ũҵ������,1998.
����[2] ����. dz̸����ƽ�ػ�е������[J]. ���ũ�ֿƼ�,2008,2(5) : 26 - 27.
����[3] ����,������,������,��. GPS �ھ�ũҵ�е�Ӧ��[J]. ũҵ�Ƽ�ͨѶ,2008(8) : 26 -29.

���������ҵ���ִ�ũҵ�����бز����ٵ��������̣�Ŀǰ���õķ���������Ҫ����ʽ�缰Բ����ȡ���ʽ��������õķ��Ҹ������ܣ�Ϊ�������ػ��������ܼ�����ʽ��Ҳ������ũҵ��������ʷ�ƾá�Ӧ����㷺�ĸ��ػ�е���������ʽ��ֻ�ܵ������ң����Һ��...
�ڻ�̫��������һ������ũ���ȵ��Ժ�ʽũ����ˮ�ô����׳�������վ�����ϵĶ����䱸Ϊ���ͻ�����6135������Ҫ����ʱ��ͨ�������������λ��ʹβ�ἰ��������ת������Ҫ��ˮ�Ź�ʱ��ͨ�������������λ��ʹ�����鼰ˮ����ת���Ӻӵ��г�ˮ���ٽ�����...
����Ŀǰ��ȫ��������ũ���ѻ���ʵ��ũҵ��е�����Ժ���������Ϊ������������9��ũ�������֡�113������ũ������ũҵ��е�ܶ�����600��kW��ӵ��ũ�ô�����������4��5��̨������������ũ��11��̨������ˮ��������6��̨�ࡢ���������ջ��е1��...
0�������ܻ�С�����ֻ������������С�����ֻ��Ĺ������Ⱥ���Ч��,�ȱ�֤�����������ȷ�ԺͿ�ѧ��,Ҳ�����ڽ�������ɱ�������������������Ч��[1].Ϊ�����С�����ֻ������ܻ�ˮƽ,��ʡ������Դ��ʱ��,��߹���Ч��,�о���С����ҵͼ�Զ�����ϵͳ....
������Դ�뻷�����������������չ����˲��ɹ�����ѹ��:һ���棬��Դ��Ϊȫ�÷�չ��Ϊ��Ҫ�Ķ������ڲ��õ�δ�����Ĵ���;��һ���棬��ͳ��Դ���ճ�ʹ���и�ȫ������������˸�����Ⱦ������������̫�����Ի�ѧ����ʽ�������������е�������ʽ��...
������Ϊһ��ũҵ������ҹ�ũҵ������ũҵ��ϵ�Ӵ��˿ڲ���������ũ��Ʒ������ȫ�����⡣�ҹ����ֵ�ũҵ��ֲ��ά���ڿ���Է��������������ĽΣ�ӵ�д�������ص���ֲ���������е����ֲת�䣬���Թ���ũ��Ϊ��������ֲ���壬�Ѿ���ʼ��ũҵ�ִ���...
������Ѩ�����羫�ܲ��ֻ��о���״��ԭ������
�����ҹ�Ŀǰ����2/3���߲���������������Եķ�ʽ������������ķ�ʽ��Ҫ��Ѩ�����硢�������缰ˮ������ȣ�����Ѩ������Ϊ����1��4�ݡ�Ѩ�̲���������Ĺؼ�����֮һ����ͳ��Ѩ�̲������˹��㲥Ϊ���������Ͷ�ǿ�ȴ���Ч�ʵ͡��������ڳ�������...
�������ҹ����ϵ���Ӧ�õ��谭���ؼ������
�����ҹ����ϵ����ĵ��������ꡢɽ��Ϊ����������С�����ɢ���������ͼ�ֲ�����ֶ�����ȱ����������ũ�����ת�Ƽ�Ϊ���㡣��һ������������е���ķ�չ����Ϊֹ���¾����������Ρ���20����90�����ǰ����������Ҫ����������ɣ��ַ����������...
0������߸����Ҷ������Ҷ�ʡ����ٷ�����������������Ƹ걦���Ҷ�������뿼�ǵ�����.�걦��ȫ���DZ�,��Ұ������άֲ��,���������ҹ������μɳ�ĵغͺ�̲�ص�һ�ֿ����Ժ�ǿ�Ķ��������ݱ�ֲ��.����Ӧ��Χ��,��������ǿ,���γɿ�״��Ƭֲ��Ⱥ��,...
0�����Գ�������,�ҹ��㷺���ô�ͳ�ķ�������,Ȼ���������ҵ��о���ʵ��������:��ͳ�����ڴ����ô���ͬʱ����ɸ����Σ��,��Ҫ����ע�⡣����,�������ֵ�һ�ĸ���������Ӿ������ķ�ʴ��ˮʴ,�����ƻ��ر�ֲ��������,���������Ϊ���ȵķ�����������...