农业机械化论文

引言
橡胶是提取橡胶树、橡胶草等植物的胶乳,可制成有绝缘性、有弹性、不透水和不透气的材料。新鲜的天然胶乳含橡胶组分 27% ~41. 3% ( 质量) 、蛋白质0. 2% ~ 4. 5% 、糖类 0. 36% ~ 4. 2% 、水 44% ~ 70% 、天然树脂2% ~5% 、灰分0. 4% 。橡胶树割胶流出,呈乳白色,固含量为 30% ~ 40% ,橡胶粒径平均为1. 06μm,可直接作表面涂层、制造薄膜和胶粘剂等,经加工也可制成生橡胶、胶乳制品( 如手套、海绵、气球、医用胶管等) ,广泛应用于日常生活中。橡胶的广泛应用带动了当地经济的快速发展,但是胶液的收集确是一大难题。目前,海南大部分胶农还是采用人工割胶,劳动强度大、效率低、安全性差,从而导致了综合成本偏高,极大地制约了橡胶产业化、商品化的发展。
为此,设计了一种仿手工割胶的割胶机械,并以弧形挡板、刀片块与螺钉弹簧的配合定距来辅助割胶; 电机摆放角度、刀片形状与刃口呈 45°角,能防止胶液外流,大大提高割胶的质量。同时,通过 PLC 对橡胶切割过程实现自动控制,可提高劳动舒适性和割胶效率。
1 割胶方法及原理
1. 1 割胶方法
乳是在韧皮部的筛管中进行,外树皮的细胞排列紧密,细胞间隙比较小,起到保护作用。割胶时只需要轻轻滑动刀盘将树皮割裂划破韧皮部分。这里仿照人工割胶的方法,采用倾斜 45°齿形刀片与弧形挡板的有效结合控制切割深度,可充电电池提供电量,电动机通过主轴带动齿形刀片快速旋转,胶农只需完成割胶动作,结构简单、操作方便。
1. 2 割胶原理
当割胶机开始工作时,由电动机提供动力源,通过主轴传递带动齿形刀片快速旋转。右手拿起割胶机,左手清除树干的一些干枯树皮,理出一条割胶通道,然后刀具向内倾斜插入树皮,沿着树文向下倾斜45°绕树大概 1 /2 之后收刀; 稳拿割胶机准确地一刀接一刀的在树上割出四方皮,完成对橡胶树韧皮部分的切割运动。刀片下面设计成略带弧形挡板,目的是为了更贴合树干,挡板后为两支柱外套弹簧,内为矩形螺纹,通过机座头部上方孔,从上方旋入矩形螺纹钉入下面挡板支柱内,固定挡板于支座头上; 通过用螺丝刀旋转上面螺钉可以起到定距作用,以此来控制刀片切入树体深度,减少割胶破坏率。电机摆放成 45°,即与挡板贴合的树干方向,同时刀片形状,刃口也为45°设置,目的是让切入树的位置为深度倾斜向里,防止胶液外流,胶液能顺利从树干倾斜口向下流到集胶碗里。
2 割胶机的机械结构与功能
2. 1 割胶机的机械结构
割胶机的机械结构如图 1( a) 所示,三维装配图如图 1( b) 所示,三维爆炸图如图 1( c) 所示。该割胶机设计为手拿式切割机构,小型便捷,机械部分主要由机体、切割装置和挡板装置组成。机体主要由支座架和手柄构成; 切割装置主要由电动机、主轴、45°齿形刀具和刀罩等构成; 挡板装置主要由弧形挡板,刀片块和螺钉弹簧等构成。
2. 2 割胶机结构的部分功能
切削部分主要由电动机提供动力源,通过主轴转动带动刀具飞快旋转以达到预期目的,提供给刀盘一个旋转动力,从而带动刀盘在树干上的韧皮部分进行切割运动。刀具结合刀罩,既美观又提高安全系数;并采用刀锋倾斜 45°完全适应划刀沟槽,避免破坏树干机理,可快速完成割胶动作,直接提高劳动舒适性和工作效率; 将刀片直接安装在电动机主轴上,减少能量损失,配合垫圈和螺母以固定。垫圈是垫在螺母与刀片之间的零件,一般为扁平型的金属环,用来保护刀片不受螺母的擦伤,分散螺母对刀片的压力。挡板部分可适应刀具和树皮结构、手动调节深度,大大提高了精准性; 手柄部分适应人体工艺学满足了握柄的舒适度和便捷度。
3 控制系统的硬件结构
3. 1 PLC 控制系统
随着电子技术和信息技术的飞速发展,出现了多种实用的控制技术,如继电器控制技术、计算机控制技术、单片机控制技术及 PLC 控制技术等。可编程程序控制器( 简称 PLC) 是带有存储器和可以编制程序的控制器,是可以在工业环境下应用而设计的一种数字运算操作的电子装置。它能够存储和执行指令,进行逻辑运算、顺序控制、定时、计数和算术运算等操作,并通过数字式和模拟式的输入输出,控制各种类型的机械和生产过程。PLC 具有编程方便、功能完备、开发周期短、可靠性高等优点,广泛应用于自动控制的领域中。本割胶机采用 PLC 为核心控制器,实现运动的自动控制。
3. 2 PLC 硬件系统
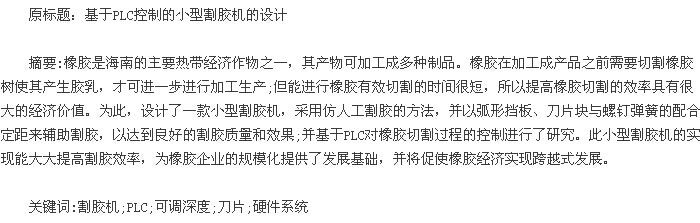
硬件系统结构如图 2 所示。PLC 硬件系统一般由中央处理器( CPU) 、存储单元、输入输出接口、电源、I/O 接口、外部设备接口及编程设备等几个部分构成。外部设备所呈现的各种信号会作为变量通过接口输入到 PLC 系统程序中,经过数据处理和逻辑运算之后,再以变量的形式输入到相对应的输出接口,就可以使输出设备控制外部设备的一系列运动。
4 PLC 控制系线图统的 I / O 接及梯形图
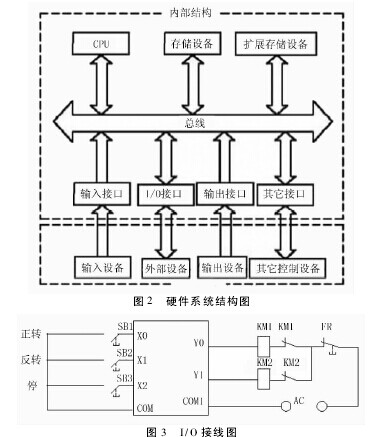
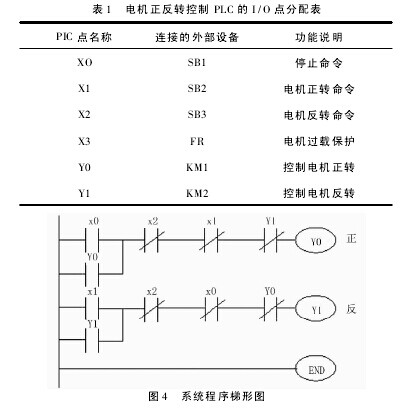
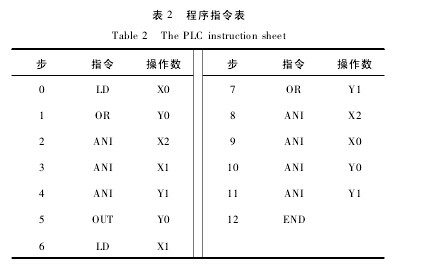
为了实现整个割胶系统运动的自动控制,割胶机的控制将采用日本三菱公司生产的 FX2N 系列 PLC来完成,然后用步进梯形指令( STL) 来编写割胶机的控制程序。其 I/O 接线顺序功能图如图 3 所示,I/O点分配表如表 1 所示,其系统程序梯形图如图 4 所示,相对应的指令表如表2 所示。其输入和输出条件分别表示如下: X0 为行位开关,用来控制电动机的正转;X1 为行位开关,用来控制电动机的反转; X2 为行位开关,用来使工作停止; FR 为过载保护; Y1 为电动机正转; Y2 为电动机反转。【图2-4】【表1-2】
5 结束语
随着经济发展,国内国外市场对橡胶以及其加工产品的需求量越来越大,橡胶作为我国主要的经济作物之一,其加工产业的发展可推动当地地区经济的发展。本文首先介绍了一种新型割胶的方法,着重介绍了割胶机的割胶原理、机械结构和主要功能,并设计了基于 PLC 控制的割胶运动系统。同时,主要从硬件设计了控制系统的结构及 I/O 接线图和相应的梯形图。该小型割胶机的实现具有很大的价值,可提高橡胶产业的经济效益、增加自动化程度、降低人工劳动强度、提高劳动舒适性,有利于橡胶加工产业的发展。
参考文献:
[1] 杨芝清. 实用橡胶工艺学[M]. 北京: 化学工业出版社,2011.
[2] 刘建. 基于 PLC 的磨线机和剥线机控制系统的设计与实现[D]. 柳州: 广西师范大学,2008.
[3] 廖常初. 可编程序控制器应用技术( 5 版) [M]. 重庆: 重庆大学出版社,2004.
[4] 廖常初. 可变控制器的编程方法与工程应用[M]. 重庆:重庆大学出版社,2001.

引言犁耕作业是现代农业生产中必不可少的生产过程,目前常用的翻耕机具主要有铧式犁及圆盘犁等。铧式犁具有良好的翻垡覆盖性能,为其他耕地机具所不能及。铧式犁也是世界农业生产中历史悠久、应用最广泛的耕地机械。大多数铧式犁只能单方向翻垡,翻垡后会...
在环太湖区域有一种用于农田灌溉的自航式农用输水泵船,俗称流动泵站,其上的动力配备为柴油机,如6135。当需要航行时,通过合上离合器挡位Ⅰ,使尾轴及螺旋桨旋转;当需要抽水排灌时,通过合上离合器挡位Ⅱ,使齿轮组及水泵运转,从河道中抽水,再借助于...
引言目前,全国大中型农场已基本实现农业机械化。以黑龙江垦区为例,垦区现有9个农场管理局、113个国有农牧场,农业机械总动力近600万kW,拥有农用大中型拖拉机4.5万台、大中型配套农具11万台、机动水稻插秧机6万台多、谷物联合收获机械1万...
0引言智能化小区播种机的研制提高了小区播种机的工作精度和工作效率,既保证了育种试验的准确性和科学性,也有利于降低试验成本和提高作物育种试验的效率[1].为了提高小区播种机的智能化水平,节省人力资源和时间,提高工作效率,研究了小区作业图自动生成系统....
引言能源与环境两大难题对人类今后发展造成了不可估量的压力:一方面,能源作为全球经济发展最为重要的动力将在不久的未来消耗殆尽;另一方面,传统能源在日常使用中给全世界人民带来了各种污染。生物质能是太阳能以化学能形式贮存在生物质中的能量形式,...
引言作为一个农业大国,我国农业面临着农业体系庞大、人口不断增长、农产品供给安全等问题。我国部分的农业种植仍维持在靠天吃饭、人力改良有限的阶段,拥有大面积土地的种植户已逐渐向机械化种植转变,而以国有农场为代表的种植集体,已经开始向农业现代化...
引言我国目前超过2/3的蔬菜栽培采用育苗移栽的方式,工厂化育苗的方式主要有穴盘育苗、容器育苗及水培育苗等,且以穴盘育苗为主[1-4]。穴盘播种是育苗的关键环节之一。传统的穴盘播种以人工点播为主,存在劳动强度大、播种效率低、播种周期长及播种...
引言我国西南地区的地形以丘陵、山地为主,土地狭小零碎分散,土壤类型及植被多种多样,缺乏机耕道,农机田间转移极为不便。这一地区田间耕作机械化的发展迄今为止大致经历了两个阶段。在20世纪90年代以前,田间耕作主要由人畜力完成,手扶拖拉机犁耕...
0引言提高戈麻打叶过程脱叶率、减少发动机功率消耗是设计戈宝麻采叶机所必须考虑的问题.戈宝麻全身是宝,是野生高级纤维植物,是生长在我国北方盐碱、沙荒地和河滩地的一种抗逆性很强的多年生宿根草本植物.其适应范围广,根蘖能力强,易形成块状连片植物群落,...
0、引言长久以来,我国广泛采用传统的翻耕技术,然而许多发达国家的研究和实践都表明:传统翻耕在带来好处的同时会造成更大的危害,需要引起注意。例如,翻耕这种单一的耕作方法会加剧土壤的风蚀与水蚀,容易破坏地表植被。另外,许多国家因为过度的翻耕导致了土...