农业机械化论文

引言
高效设施农业是现代农业的显着标志, 是最有活力的农业新产业。 近几年, 我国设施栽培面积逐年增加。 2012年我国设施栽培面积为1.45Mhm2, 其中钢架大棚占63.5%[1]。 我国设施农业起步较晚, 机械化作业水平较低, 作业质量也较差, 除耕整地大多采用机械化外, 施肥、 播种、 移栽等很多作业环节主要由人工完成。 由于我国目前温室棚型结构设计时未考虑机械作业装备进温室的要求, 一些大中型自走式动力拖拉机难以在温室内实施, 故而相应的配套机具也难以在温室内发挥其效用, 直接制约着设施栽培产业的规模发展。 因此, 开发一种多功能小型化的高配套率温室用拖拉机显得很有必要。
1 电动拖拉机现状
1.1国外现状
最早研究生产电动拖拉机的是德国的西门子公司, 其在上世纪初就推出了36.8kW电驱动乘坐式拖拉机, 采用电缆线供电方式, 配带旋耕机具在田间作业。 但其工作效率受电缆长度的限制, 并且还需配备升压装置[2]。 从上世纪70年代开始, 研制的电动拖拉机都是选用电池电源或小型发电机组作为动力源。 最早以电池组作为动力的电动拖拉机是由美国GeneralElectric公司 推出的Elec-Trak系列电动拖拉机[3], 功率从5.9~11kW不等, 主要用于草坪修剪作业。 直至上世纪90年代电力技术和电池技术有了很大的提高,电动力拖拉机的研究得到了许多国家的追捧。 美国Gorilla Vehicles 公司生产的 e-ATV 系列电动拖拉机 ,功率为4.8kW到6.2kW, 控制由智能控制器完成, 实现无级变速[4]。 加拿 大Electric Tractor 公司 的ElectricOx系列电动拖拉机采用独特设计的双电机/齿轮箱机构、 电子差速器等先进设备, 具有制动能量再生功能, 除实现割草功能外, 可直接挂接铧式犁、 旋耕机、 扫雪机等。 2011年日本井关农机株式会社推出适合园艺作业的小型电动拖拉机[5], 最大 功率约为9.5kW, 可进行旋耕和除草作业。
1.2国内现状
2007年南京农业大学高辉松博士等最早开始从事电池组为动力的电动拖拉机研究, 提出了一套电动拖拉机评价指标以及电驱动系统设计方法, 对驱动系统进行了仿真研究[6]。 2012年西北农林科技大学杨福增教授团队研制出了一种微型遥控电动拖拉机[7], 并进行了整机试验, 对样机在某一犁耕工况下各档位的牵引效率也进行了试验研究。 2012年中国一拖集团与美国通用公司正式签订电动拖拉机项目合作协议, 共同推动实现电动拖拉机关键技术的突破, 拟开发用于大田作业用的电动拖拉机原型机[8]。
综上所述国内对电动拖拉机已开始少量的研究,但仍处于起步阶段, 这些电动拖拉机均是针对露地作业而设计, 针对设施栽培用的小型自走式电动拖拉机方面的研究鲜有报道。
2 设施栽培用小型电动拖拉机结构及部件选配
2.1整机结构
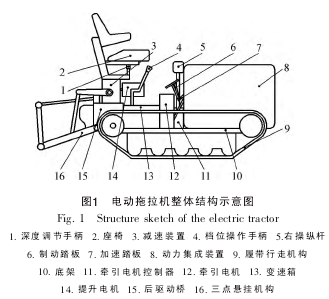
针对国内外研究现状, 结合温室结构特点, 农业部南京农业机械化研究所提出了一种温室 (钢架大棚)内用小型履带式电动拖拉机。 整机结构布局示意图如图1所示, 主要包括动力集成装置、 转向制动装置、传动系统、 履带行走机构、 提升装置和座椅。 动力集成装置安装在底架的前端, 主要包括能量管理控制器和锂电池组; 转向制动装置位于底架的中部, 主要包括左操纵杆、 右操纵杆、 制动踏板和加速踏板; 传动系统包括牵引电机、 牵引电机控制器、 变速箱、 后驱动桥和档位操纵手柄; 履带行走机构传动连接在后驱动桥的两侧; 提升装置安装在后驱动桥的上方, 处于底架尾部。
2.2工作原理
整机工作原理如图2所示, 主要包括电气控制部分和机械传动部分。 电气控制部分负责整个电动拖拉机的能量控制与分配; 机械传动部分负责动力输出。
能量管理控制器连接锂电池与牵引电机控制器、 提升电机控制器, 控制锂电池的电能释放。 牵引电机控制器通过对牵引电机的转矩、 转速和转向的控制, 以达到对牵引电机动力输出大小的控制; 牵引电机的动力经过变速箱、 后驱动桥, 最终将动力传递给履带行走机构。 加速踏板和制动踏板下的传感器信号可传递给牵引电机控制器, 相应地传输给能量管理控制器重新分配能量, 以实现加速和减速等动作。 通过左操纵杆和右操纵杆的联合控制可实现整个拖拉机的转向。【1】
当电动拖拉机不进行农机具作业时, 能量管理控制器将只释放电能给牵引电机, 以满足电动拖拉机直行、 转向等动作所需的能量即可, 通过对档位操纵手柄的调节, 可实现不同行走速度的控制。 当农机具耕整地作业时, 需要同时分配电能给牵引电机和提升电机, 牵引电机不但要提供自身行走动力, 还要负责机具工作动力; 提升电机负责三点悬挂机构的工作高度,实现对耕深的智能无级调控, 可调节深度调节手柄来调整机具作业的深度, 完成不同耕深要求的作业。
2.3核心部件选配
2.3.1 电池选择
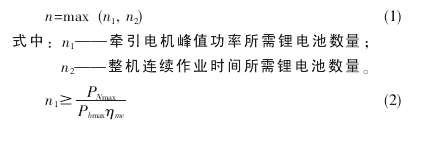
电池作为电动拖拉机工作的动力源, 其技术的发展对整个电动拖拉机的动力性、 经济性和安全性至关重要。 考虑到锂离子电池具有高负荷作业能力和续航能力, 选用锂离子电池作为电动拖拉机的动力源。 而且锂电池质量轻, 体积也就相对较小, 有利于整机在潮湿的钢架大棚环境中行走。 锂电池组的数量则根据牵引电机的最大功率和连续作业时间这两个参数来确定。 锂电池所需的数量n最少为:【2】
2.3.2 能量管理控制器
电动拖拉机用的电池使用中其性能发挥得如何,除与电池模块自身性能有关外, 能量管理系统的正常工作会使电池模块的性能得以充分发挥, 减少电池模块故障, 延长使用寿命。 能量管理技术包括电池荷电状态 (SOC) 技术、 能量回收技术、 热管理技术、 通信技术等。 能量管理控制器通过综合分析锂电池组驱动牵引电机和提升电机等各个动力部件运行特性及效率特性, 优化动力系统效率, 实现总体效率最大。 能量管理控制器的目标为:【3】
2.3.3 牵引电机选择
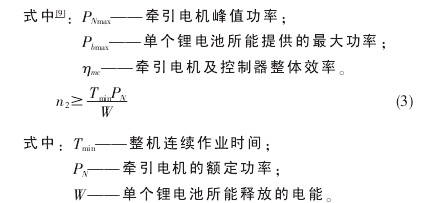
目前常用的牵引电机有直流串励电机、 笼型感应电机、 永磁无刷电机、 开关磁阻电机等。 永磁无刷直流电机相比于其他电机, 具有良好的动、 静态调速特性, 且结构简单、 运行可靠、 易于控制, 可采用经典的PID控制, 算法简单紧凑, 运行可靠。 对于牵引电机最为重要的选择参数为额定功率, 本样机中电机所需的额定功率PN为:【4】
2.3.4 电动提升器装置
现有的拖拉机液压悬挂系统多为机械式, 该系统由杆件和弹性元件组成, 存在着结构比较复杂, 弹性元件的迟滞, 机械摩擦和杆件的胀缩会影响调节性能等缺点。 针对设施栽培作业质量水平一致的要求, 本样机采用了电动提升器装置, 包括提升电机控制器、提升电机、 减速装置、 深度调节手柄、 三点悬挂机构、 直线位移传感器和转角传感器等。 提升电机控制器控制着提升电机的转矩、 转速和转向, 提升电机的动力输出端通过蜗轮蜗杆减速装置降速后, 将动力传递至三点悬挂机构。 该电动提升器装置中安装有力位移传感器和转角位移传感器, 可间接测量耕作阻力和耕深参数。 作业时, 驾驶员调定耕作深度目标值后,电动悬挂装置自动控制完成农具的提升或下降, 以实现实际耕深与目标耕深的一致。
3 小结
温室用小型电动拖拉机作为一种新型设施农用动力机械, 具有效率高、 噪音低、 污染小、 操作方便等优点, 是一项集机电于一体的高新技术装备, 其将节能环保新能源技术引入到农机装备领域, 符合高效绿色设施农业装备发展要求, 同时推动了农机装备智能化的进程。
电动拖拉机的发展与许多瓶颈技术有关, 如新型电池 (如太阳能电池、 氢能电池、 燃料电池等) 技术的应用直接决定续航里程和棚内作业效率。 另外还有一些配套设施的缺乏, 如快速充电设备的配套, 电池充电时间过长等问题。 这些关键技术的突破有助于加速电动拖拉机的推广应用。 总之, 电动拖拉机虽然目前仍处于发展起步阶段, 短期内可能还不能取代传统燃油拖拉机, 但是电动拖拉机的产业化经营的前景很广阔, 相信其普及会在不久的将来实现。
参 考 文 献
[1] 农业部农业机械化管理司 . 全国农业机械化统计年报 -2012[M].2012.
[2] 高辉松, 朱思洪, 等. 电动拖拉机发展及其关键技术 [J]. 拖拉机与农用运输车, 2007, 34 (6) : 4~7.

引言犁耕作业是现代农业生产中必不可少的生产过程,目前常用的翻耕机具主要有铧式犁及圆盘犁等。铧式犁具有良好的翻垡覆盖性能,为其他耕地机具所不能及。铧式犁也是世界农业生产中历史悠久、应用最广泛的耕地机械。大多数铧式犁只能单方向翻垡,翻垡后会...
在环太湖区域有一种用于农田灌溉的自航式农用输水泵船,俗称流动泵站,其上的动力配备为柴油机,如6135。当需要航行时,通过合上离合器挡位Ⅰ,使尾轴及螺旋桨旋转;当需要抽水排灌时,通过合上离合器挡位Ⅱ,使齿轮组及水泵运转,从河道中抽水,再借助于...
引言目前,全国大中型农场已基本实现农业机械化。以黑龙江垦区为例,垦区现有9个农场管理局、113个国有农牧场,农业机械总动力近600万kW,拥有农用大中型拖拉机4.5万台、大中型配套农具11万台、机动水稻插秧机6万台多、谷物联合收获机械1万...
0引言智能化小区播种机的研制提高了小区播种机的工作精度和工作效率,既保证了育种试验的准确性和科学性,也有利于降低试验成本和提高作物育种试验的效率[1].为了提高小区播种机的智能化水平,节省人力资源和时间,提高工作效率,研究了小区作业图自动生成系统....
引言能源与环境两大难题对人类今后发展造成了不可估量的压力:一方面,能源作为全球经济发展最为重要的动力将在不久的未来消耗殆尽;另一方面,传统能源在日常使用中给全世界人民带来了各种污染。生物质能是太阳能以化学能形式贮存在生物质中的能量形式,...
引言作为一个农业大国,我国农业面临着农业体系庞大、人口不断增长、农产品供给安全等问题。我国部分的农业种植仍维持在靠天吃饭、人力改良有限的阶段,拥有大面积土地的种植户已逐渐向机械化种植转变,而以国有农场为代表的种植集体,已经开始向农业现代化...
引言我国目前超过2/3的蔬菜栽培采用育苗移栽的方式,工厂化育苗的方式主要有穴盘育苗、容器育苗及水培育苗等,且以穴盘育苗为主[1-4]。穴盘播种是育苗的关键环节之一。传统的穴盘播种以人工点播为主,存在劳动强度大、播种效率低、播种周期长及播种...
引言我国西南地区的地形以丘陵、山地为主,土地狭小零碎分散,土壤类型及植被多种多样,缺乏机耕道,农机田间转移极为不便。这一地区田间耕作机械化的发展迄今为止大致经历了两个阶段。在20世纪90年代以前,田间耕作主要由人畜力完成,手扶拖拉机犁耕...
0引言提高戈麻打叶过程脱叶率、减少发动机功率消耗是设计戈宝麻采叶机所必须考虑的问题.戈宝麻全身是宝,是野生高级纤维植物,是生长在我国北方盐碱、沙荒地和河滩地的一种抗逆性很强的多年生宿根草本植物.其适应范围广,根蘖能力强,易形成块状连片植物群落,...
0、引言长久以来,我国广泛采用传统的翻耕技术,然而许多发达国家的研究和实践都表明:传统翻耕在带来好处的同时会造成更大的危害,需要引起注意。例如,翻耕这种单一的耕作方法会加剧土壤的风蚀与水蚀,容易破坏地表植被。另外,许多国家因为过度的翻耕导致了土...