职称论文

摘要:最近几年, 康复机器人技术随着科学技术的发展及现实需求应运而生, 这可以说是机器人技术在医疗康复行业的最新运用。然而, 我国对于医疗康复领域中气动人工肌肉运用的相关研究依然处在最初的层面上, 为此, 需将气动助力机械腿作为基本的研究目标, 对气动助力机械腿伺服控制开展深入地探究, 进而促使人在行走过程中的损耗量, 使得下肢的机体得到明显地好转、直至恢复正常。本文首先对气动肌肉驱动关节及人体步态问题进行分析, 利用d SPACE实时仿真系统进行了气动助力机械腿的相关控制, 同时对最终的控制参数作出科学性的调整, 最终达到了对气动助力机械腿伺服控制的最终目的。
关键词:气动助力机械腿; 伺服; 控制;
在偏瘫的治疗方面, 包含许多不同的方法, 譬如:物理疗法、运动康复疗法等, 但是不管是选择哪一种方式, 都需要对瘫痪肢体进行运动康复训练。以往的运动康复是因治疗师把握患者受损肢体, 帮助患者来做各种动作, 以达到维持患者肢体活动范围的目的, 促使运动功能在最短时间内正常恢复, 但是这需要大量的人力支持。随后, 康复机器人被研发出来。不同的康复训练阶段, 康复机器人的康复方式的选择也是不同的。
将气动人工肌肉作为主要的驱动设备, 通过气动肌肉带动关节正常运动, 同时配合下肢的运动进行姿态的调整, 从而促使关节的活动区域得到进一步的拓展。气动助力机械腿提供相应的动力, 带动着腿部开展一系列的运动, 进而促使髋关节、膝关节逐渐恢复正常, 可帮助广大下肢运动不便、下肢瘫痪的病人在最短时间内其运动机体功能恢复正常状态, 促使广大患者的运动功能得以恢复, 后期若坚持正确的持续性锻炼, 可达到非常好的恢复效果。

一、人体步态周期
通常气动助力机械腿的髋关节与膝关节都是由气动肌肉来进行驱动的, 在气动助力机械腿各关节的弯度、速度发生相应变化的情况下, 便可供应一定的助力, 从而可完成髋关节与膝关节的功能训练。其中, 髋关节与膝关节的正常运动状态和机体下肢的运动状况具有相同的特征表现。
关节、骨骼、骨骼肌共同组成人体的整个下肢, 支撑着人体的自重, 是确保人体能够正常行走的重要部分。对下肢而言, 行走是最基础的一方面功能, 表现在行走时的前进、后退、行走方面的改变等等, 人在行走的过程当中主要是依赖于骨骼、骨骼肌中的神经系统来加以完成的, 所以, 整个人体的下肢构成状态十分复杂, 在这个复杂的自动化体系中, 骨骼起到了杠杆的作用, 关节起到桥梁的连接作用, 神经系统则主要发挥一定的控制作用, 通过肌肉的反复收缩为下肢行走提供所需动力, 最终实现机体下肢的正常行走过程。
在整个人体下肢关节当中, 髋关节、膝关节、踝关节作为主要的运动部位, 涉及到的运动有:大小腿的前后摆动、侧方摆动;膝关节的大幅度后摆;脚部踝关节的上下内部旋转, 等等。站在机体上肢的层面进行分析的话, 在一系列的下肢运动中, 行走可以称得上是一种最基本的运动方式, 并且, 整个下肢运动过程中, 约束性、周期性是十分显著的。
我们把人体简化为一个四刚体的模型, 其中, 髋关节、膝关节以站立位为中心进行弯曲或伸展, 通常将伸展的方向定义为负方向、弯曲的方向定义为正方向, 把脚跟落地作为整个步态的开始, 同一脚跟的再次落地作为同一步态周期的结束。
摆动相、站立相是人体步态中的两个主要相位, 其中, 站立相也叫做支撑相, 通常是从脚跟落地到脚尖离开地面, 在整个步态周期中, 脚部支撑面接触时间占到60%;摆动相则是从脚尖离开地面后到脚跟落地的整个过程, 脚部脱离支撑面的时间在整个步态周期中占到40%, 在整个站立和摆动的过程当中, 步行速度与持续时间有着很大的联系, 在步行速度非常快的情况下, 相应的持续时间便会逐渐缩短, 在整个步态周期内正常速度仅占到25%左右。
二、气动助力机械腿整体结构
气动助力机械腿的驱动设备为自行研制的气动肌肉, 此种气动肌肉所提供的张力高达200N, 可是, 受到橡胶过低性能的影响, 整个气动肌肉的耐用性能待通过相关措施加以提升。
此实验过程中, 气动助力机械腿是由所在的实验室的人员来进行具体设计, 使用2根气动助力机械腿将髋关节、膝关节与人的机体紧密地连接在一起。随着2根气动肌肉的不断伸缩、扩张, 连杆也带动着机体的大腿开始不断地运动, 从而提供相应程度的助力支持。将膝关节装置固定于机体的膝盖上, 在气动肌肉不断收缩、扩张的时候会连带着相应的连杆运动起来, 带动机体小腿不断运动, 从而提供有效地动力。
三、气体助力机械腿基本属性的实验研究
(一) 髋关节特性实验
在进行髋关节特性实验中, d SPACE输出1.5V置位电压, 从而使得两根气动肌肉从0.18Mpa的压力数值不断地发生相应的变化, 逐渐增高到0.28MPa, 这样就会促使另一个气动肌肉从最初的0.18MPa降低到0.08MPa, 整个过程需1′40″的时间。
在测试髋关节动态属性的过程中, 一定要确保2根气动肌肉所输入的压力数值自始至终在0.18MPa的状态, 这样就会使得在髋关节的位置, 关节初始角度处于零度。其中需要注意的问题是, 阶跃信号的差异性会引起气动肌肉关节产生不同的变化。
(二) 膝关节特性实验
在膝关节静态实验中, d SPACE的D/A通道输出1.5V置位电压, 这样会促使2根气动肌肉自始至终压力保持在0.18MPa~0.34MPa的范围;另一气动肌肉压力保持在0.18MPa~0.02MPa, 整个过程需1′40″的时间。通过这些数据可以明确的看出, 关节静态线性一直处于非常好的一种状态。
四、气动助力机械腿穿戴实验探究
通过对PI控制模型进行模拟控制, 对气动助力机械腿伺服控制进行研究。一般情况下, 气动助力机械腿在人与人彼此接触的场合进行运用, 其中, 对运动的稳定性确有很高程度的要求。所以, 在保证整个运动过程中完全稳定的状态, 对整个过程的精准度有着非常高的要求。在跟踪人体步态信号的过程中, 保持相位处于特定的要求范围即可。
(一) 髋关节跟踪实验
在装置髋关节跟踪实验运用PI控制的情况下, 设置Kp为0.009, Ki为0.1.髋关节跟踪曲线如图4-1所示。通过图可以了解到, 跟踪信号相位是明显滞后的, 存在着比较大的误差。固定Kp、Ki的PI控制效果非常不理想。
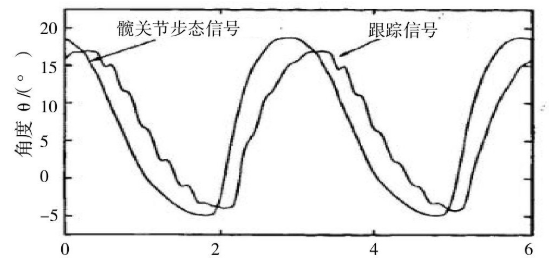
图4-1 PI控制髋关节跟踪曲线
在运用模糊自整定PI控制过程中, 设置Kp初值为0.008, Ki初值为0.09.量化因子按照一定的比例进行设置。人体髋关节模糊自整定PI跟踪实验曲线显示, 相位滞后逐渐减小, 幅值存在的误差是非常小的。
(二) 膝关节控制实验
在装置膝关节跟踪采用PI控制的情况下, 设置Kp为0.01、Ki为0.1.PI控制膝关节跟踪曲线, 如图4-2所示, 由图可以了解到, 与髋关节控制实验相同, 跟踪信号相位存在明显的滞后, 存在的误差也是非常大的。可以说, 将Kp、Ki进行固定, 最终的控制效果是非常不理想的。
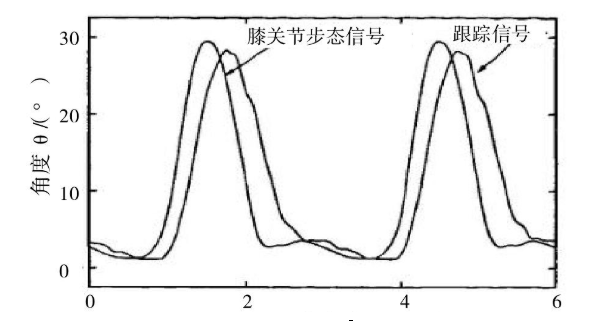
图4-2 PI控制膝关节跟踪曲线
(三) 气动助力机械腿关节联动实验
由于气动助力机械腿膝关节与髋关节运动是互相不影响的, 为此, 可给膝关节与髋关节的启动信号设定同一个开关, 从而促使两个关节的联动。这种控制方法是非常简单的, 而对髋关节、膝关节复杂的关节运动进行跟踪是存在一定难度的, 并且产生的跟踪误差也非常明显。
气动助力机械腿髋关节和膝关节跟踪曲线如图4-3所示。人穿戴气动助力机械腿在做康复训练的过程当中, 在跑步机上康复训练速度可控制在1.1m/s-2m/s.康复训练速度、时间等参数的设置在d SPACE的综合实验与测试环境中得以完成。
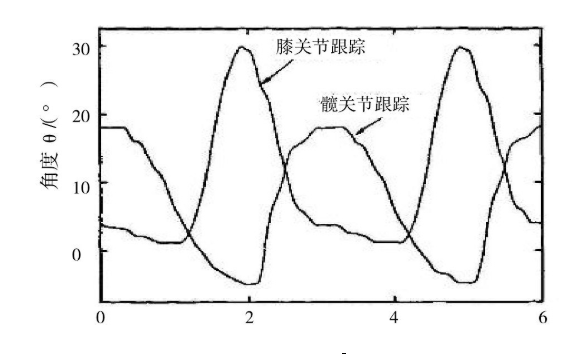
图4-3髋关节和膝关节跟踪曲线
本文首先对人体步态周期进行了系统性的探究, 从而提出气动助力机械腿膝关节、髋关节所需跟踪的人体步态信号。对气动助力机械腿的整体结构进行了简单的介绍, 对膝关节、髋关节的静态特性、动态特性进行了实验研究。在这一基础上, 运用模糊自整定PI控制策略完成了人穿戴气动助力机械腿的关节控制, 同时完成了人穿戴气动助力机械腿联动实验。整个实验过程当中, 因气动肌肉特有的充放气特性, 气动肌肉驱动关节具有一定的滞后性。气动机械腿的髋关节、膝关节在幅值上很好的对人体步态信号进行了全面跟踪, 相位上具有一定的滞后性, 这种滞后的消除是需要进行深入探究的。
结束语
将气动人工肌肉作为驱动设备, 不断加强机体固有的步行性能, 从而更好地为广大偏瘫患者进行气动助力机械腿的康复训练。通过上述内容对关节控制策略的具体研究, 在d SPACE的基础运用上顺利地实现了气动助力机械腿的伺服控制。到现在, 我国成功地研发出一套比较完善的气动助力机械实验系统, 为今后下肢助力机械的日益完善化开阔了广大的空间。可是, 目前的气动助力机械腿仍然存在很多有待完善的方面, 譬如, 我们可设计出更加灵活、轻盈的结构、进一步拓展气动肌肉的缩张力等等, 为日后广大瘫痪患者、下肢无法运动的病人提供更好地可移动康复训练设备。
参考文献
[1]雷晶, 魏铁建, 王小丽, 路琼琼。气动手爪位置伺服系统的建模与仿真[期刊论文]-机械研究与应用2009 (06) .
[2] 刘锦程。基于d SPACE的机械腿伺服气缸的研究与设计[学位论文]硕士2007.
[3]杨喜飞。助力式下肢外骨骼机构设计与分析[D];天津科技大学;2012年
[4]谭世江。气动助力机械腿机构设计及实验研究[D];哈尔滨工程大学;2008年。
[5]周克东;王进戈;柳在鑫;何蓉;谭玉龙;罗东东。丘区农机仿生助力腿的动力学仿真与分析[J];机械设计与研究;2013年04期。
[6]邱支振。机械工程的未来与仿生[J];安徽工业大学学报 (自然科学版) ;2002年03期。
[7]陈骐;熊克;卞侃;金宁;王帮峰。一种新型柔性驱动器的制备和性能研究[J];兵器材料科学与工程;2009年02期。

EPC总承包项目管理体系,是企业进行燃气项目管理时的常见方法,作为一种现代化工程建筑模式,它可以实现项目建设责任关系的改变,明确责任主体,发挥承包单位及技术优势,强化质量管理。...

本文通过锻工生产环节安全防护,全面化的车工、镗工防护,铣工操作安全防护,刨工、插工操作部分安全防护策略,分析机械加工工艺操作要点。因此,文章研究结果,为机械生产资源科学性调节提供新思路。...

本文首先分析了PLC技术的工作原理、特点及应用优势,然后探究了PLC技术在电气工程自动化控制中的具体应用,以期提高电气自动化控制水平。...

主要先说明自动化仪表和自动化控制技术的内容,然后说明工业自动化仪表与自动化控制技术的发展现状,提出工业自动化仪表的控制方法,最后说明自动化控制的运用以及未来发展方向。...

本文探讨了一些在土木工程监理工作中的问题,并提出了针对性的措施和解决办法,希望进一步提高土木工程监理工作水平,保障土木工程项目的施工质量。...

随着建筑智能化在我国的不断普及与深化,越来越多的楼宇开始采用楼宇自动控制系统、表计计量系统及设施管理系统等,在一定程度上提高了人员工作效率,节约了能源。但由于设计理念落后、需求介入不足、设计与施工不一致等问题....

本文对建筑工程造价预算控制的要点及策略进行分析,为建筑工程造价预算控制相关工作提出一些参考和建议。...

本文就探究PLC控制系统在油田安全当中的具体应用进行简单分析,希望为接下来有关PLC控制系统在生产安全当中应用的研究提供一定的帮助。...
分析了小米公司在发展过程中采用的成本控制措施以及相应取得的成果,最后结合现有的市场情况提出相关建议。...

分析了科学检测对于铸造产品质控工作的作用,并对铸造生产各环节的质量检测措施进行了介绍,进而就优化质量检测技术效力的策略进行了探讨。...