高等教育论文


一、引言.
培养应用创新型人才是“十二五”教育的重点.以此为导向,摆脱高校教育一直以来的以教为主、学生被动学习的“填鸭式”教学局面,燃起学生学习创造的热情,培养学生乐于思考的意识和团结协作的精神,是高校教育教学迫切要改革与探索的地方.本文从机械工程类应用创新型人才培养的目标出发,结合学院具体科研项目的展开和推进,探索机器人的研究在应用创新型人才培养中的作用,并从机器人软件虚拟样机仿真和硬件系统设计两方面进行了人才培养的改革实践.
二、机械工程类应用创新型人才培养的目标.
不同类型的人才具有不同的培养目标与具体要求,当前机械类学科的总体培养目标[1]是基础扎实、适应性强、整体素质高的应用创新型人才.这类人才应该具备以下素质[2]:身心健康,求知欲强,思维敏捷,专业知识扎实,实践经验丰富,具有合作意识.要实现这类人才的培养目标,需要从以下几个方面着手:(1)突出素质教育.包括思想文化素质与科研工程素质.机械类学科人才培养的目标之一即是将所学知识有效地转化为现实生产力的高素质工程技术人才.(2) 锻炼创新意识.目前,我国在向制造业强国转变过程中需要大量具备创新思维与能力的机械类人才,服务于企业和社会.(3)强化实践能力.只有具备扎实的理论知识与较强的实践能力,才能胜任制造企业中的工程技术等岗位.
然而,目前高校机械类应用创新型人才培养过程中还存在以下问题.
1.培养模式单一.一些本科课程的实验,内容死板,步骤固定,方法单一,学生按部就班的执行每一步就可以得到想要的结果.这样的方式致使学生没有更多的施展自己想象力的空间,好奇心与求知欲无法调动起来.
2.缺乏创新教育理念.长期的以教为主的课堂教育,让学生形成了不会就问,教师搬套现成答案的填鸭式解惑模式.学生遇到问题不知道如何主动寻找答案,如何开创新局面.
3.课程偏理论、轻应用.一些课程理论性强、枯燥乏味难以吸引学生,抑或学生在学习过程中看不到应用的背景和前景,进而不愿意花时间去投入学习,而将更多的时间用来学习英语、计算机等与等级考试直接相关的课程.
三、机器人的研究对机械工程类应用创新型人才培养的积极作用.
科研与教学并不是对立体,实际上,从“做”中“想”、从“做”中“学”,使“学”在“做”中巩固加深,诠释这两者之间有着千丝万缕的联系.笔者从机器人领域的研究中探索对机械工程类应用创新型人才的培养,作用如下.
1.提高学生设计与动手能力.就机器人设计而言,从机械结构到硬件测控系统,都需要合理规划与布局.机器人研发系统的搭建过程,一方面巩固了学生的课堂所学,并提高了学生的动手能力,另一方面开动了学生脑筋,完成了学生的“学”到“用”到“创新性应用”的转化.
2.增强团队协作精神.从机器人的机械系统和测控系统设计到样机实验平台的搭建,再到仿真实验和物理实验,整个过程需要多名学生协作共同完成.每位学生既要做好自己本职的工作,还要勤与其他学生沟通交流,及时反馈自己的进展及各种问题,增强团队意识与协作精神.
3.培养学生解决问题的能力.一台机器人样机(包括虚拟样机、物理样机)的搭建,是一个从无到有的过程,从零部件的选择,传动方案的确定,尺寸、材料的选取,再到传感器、电机、减速器等的选择与设计,各个电气模块类型、参数的确定等.在整个搭建过程中,学生会遇到许多在课堂上无法想象的问题,我们可以引导学生通过查找相关书籍、网络资料、与组员沟通交流等途径解决遇到的问题,培养学生分析问题、搜索知识方面的能力.
4.加强学生的多门课程知识的融合.机器人技术本身是一门新兴、边缘、交叉学科,机器人的研发过程需要学生具备工程力学、机械原理、机械设计、电子技术、嵌入式技术、传感器技术、控制原理、计算机控制技术等多门课程知识,并完成课程间的知识融合,由单一的课程知识点到学科间的面,甚至形成知识体系.
5.宽口径专业培养.机器人技术的研究诞生了一门新.[3],它是力学、机械学、计算机科学、电子学、信息论、控制论等许多学科交叉、融合的结果.机器人技术的特点有利于培养具有交叉学科基础的复合型人才.
四、机器人研究在本院人才培养中的改革实践
一方面,笔者在本院讲授《机械设计》、《机械动力学基础》、《工业机器人技术》、《控制工程基础》、《计算机控制技术》等课程,将6自由度工业机械臂以及学生研制的独轮车机器人、自行车机器人作为实例,介绍线性代数、机械动力学与机器人技术、计算机控制技术等课程之间的关联,提高学生对单一课程的重视程度,并从直观、科学、实用等多个切入点引导学生的学习兴趣和热情.另一方面,针对毕业设计的学生从机器人软件虚拟样机仿真与硬件物理样机设计两方面加强学生的创新性培养.
1.机器人软件虚拟样机仿真方面.根据科学研究项目为学生制定子项目“基于ADAMS和MATLAB的肘型6-R机器人动力学联合仿真”,“基于虚拟样机的自行车机器人回转运动平衡控制”.要求学生建立出机器人的虚拟样机[4],通过MATLAB软件设计PID控制器,完成对虚拟样机的控制.学生在设计过程中,自行设计机器人的机械传动方式和几何尺寸、规划机器人行走路径、调节PID参数等工作.
遇到软件使用、参数调节等各种问题通过同组人员间的讨论、查找资料以及网络资源等多途径解决.图1和图2分别为6自由度机械臂末端执行螺旋线轨迹仿真图以及动画演示界面.学生在完成这项工作过程中,需要学习掌握相关软件,包括三维建模软件Pro/E、机械动力学分析软件ADAMS、设计控制器的数学软件MATLAB/Simulink、编写演示界面的C++图形化界面语言MFC.此外,还要进行机械设计、动力学建模、末端轨迹规划、关节控制器设计等.最后,将基于多学科知识设计出的虚拟样机结合多个软件进行动态联调和演示,每一步都需要学生开动脑筋、勤思考、沟通交流、勤实践.例如,在轨迹规划中,学生根据机械臂的不同工作状态设计了几种轨迹:焊接用的直线、圆轨迹,缠绕用的螺旋线轨迹,拧螺钉用的自转提升轨迹.
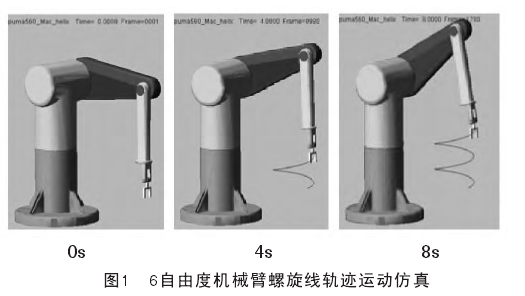
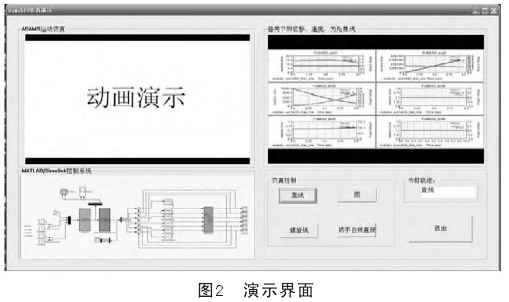
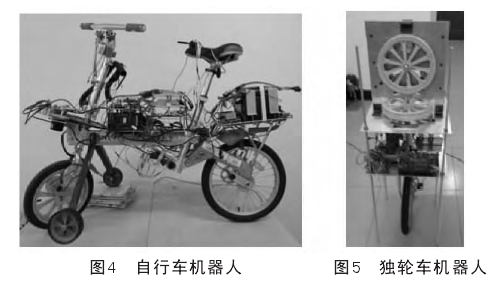
图3为障碍物干扰下自行车机器人回转运动图,学生在指导教师规定的平衡运动基础上,创造性的增加障碍物,在一系列调试得到平衡运动后,又通过改变障碍物的形状、尺寸等参数讨论车体平衡条件.
这些项目研究充分发挥了学生的想象能力和创造思维,并获得了很多意想不到的成果.
2. 机器人硬件物理样.
机设计方面.根据指导教师的在研国家自然科学基金项目,为学生制定子项目“前轮驱动自行车机器人物理样机设计与制作”、“具有转弯功能的独轮车机器人硬件平台搭建”.要求学生设计出机械传动方案与测控系统方案,并搭建出实物样机,完成各个功能模块之间的联调.图4和图5分别为学生研制的自行车机器人与独轮车机器人物理样机.
为了便于各种传感器的安装,做机械设计部分的同学与做检测系统设计部分的同学要经常沟通交流.
期间,学生对机器人这一机电一体化系统的兴趣逐渐增加,主动协助实验室的研究生学长进行平衡控制实验研究,并提出了一些超越项目本身的大胆设想,比如摆把换向、腾空跳跃、旋把前进等.
通过具体项目,巩固了学生机械电子、测量控制方面的硬件知识,激发了学生的科研热情,取得了很好的教学效果.
五、结语.
以机器人研究为平台,以培养机械工程类应用创新型人才为导向,结合具体项目的特点探索人才培养模式改革,以期增强学生的创新意识、创新思维、创新能力,培养学生的团队合作精神,强化学生的工程实践能力,这是值得进一步探索的人才培养模式,可以为国家和社会发展提供所需的机械工程类人才.
参考文献:
[1]李学艺,魏军英,丁淑辉.应用创新型机械类人才培养模式研.

注重中医思维,以学科建设推动中医诊断学教学改革。中医学作为一门研究人体生命健康和疾病防治的医学,整体观念和辨证论治是其特色,但现行中医教学中套用西医课程范式,教学内容没有从本质上反映中医诊治疾病的特点;相关领域科学研究和成果大多没有遵循...
【摘要】:1985年,国家教育部颁文提倡我国有条件的综合大学、师范院校中文系应当把电影课作为重要选修课列入教学计划。近30年来,不少地方高校在本科影视教育发展期间不无遗憾地沦为第三世界。若要改变弱势现状,就必须设立影视专业,将影视课纳...
随着科技信息技术的日新月异,以及企业管理的新需求,电子商务的出现使得新型财会职位信息化的目标得以实现。而这样一个目标的实现,恰恰又一次让传统财会职位受到严重冲击。在与新型财会职位的比拼中,传统财会职位无疑大败而归,传统财会所做的一切工作,...
近年来,我国竞技体育水平取得了较大的进步,以奥运会和亚运会为例,获得的金牌数名列前茅。从夺取金牌的项目分布看,传统的优势项目依然占有较大的比例,但从金牌的增长点来看,潜优势项目起到主要作用。中国奥委会主席刘鹏已经多次公开表示:何以解忧,只有...
2013年全国普通高校毕业生规模达到699万人,比2012年增19万。一方面高校毕业生就业形势更加复杂严峻;另一方面国内最大的人力资源服务商前程无忧发布《2013年第三季度雇主招聘意愿调查报告》,报告显示,雇主招聘需求仍然强劲,特别是服务业兴盛带来...
信号分析与处理是作为机械类研究生的学位课程之一来开设的,是以培养研究生掌握现代测试与信号分析理论与技术、提高其科学试验能力为主的课程,是一门有生命力的课程,对于研究生的培养发挥了重要作用.该课程主要论述工程测试、信息与信号分析领域的理论与技术,...
近年来,随着我国经济的飞速发展和国际地位的不断提高和各高校留学生的招生与培养方面力度的不断加大,越来越多的外国学生选择到中国留学.同时,我国较高的医学教育水平和较低廉的医学教育费用也吸引了众多的外国留学生选择到中国学习医学.江苏大学自2005年招生...
科学技术迅猛发展,知识更新的周期大大缩短,新学科、新领域的不断出现并很快转变为生产力。《传热学》是热能工程专业的一门主干课程,也是发展石油化工科技的支柱学科之一。长期以来,它围绕热传递现象的基本规律与工程计算,形成了一整套课程教学体系,在...
一、以消费者行为学为例课堂教学的效果是教师和学生双边活动过程中众多主客观因素综合作用的结果,这些因素主要有教师的知识能力水平、性格气质特点、情绪情感状态及至外貌形象,学生已有的知识水平、认知特点和学习风格、身心状态,教学环节的设计、教学内...
一、引言《高等职业教育英语课程教学要求》规定,高职英语课程以培养学生实际应用英语的能力为目标,加强对听说能力的培养和训练。要真正提高高职学生的英语听力能力,教师必须找到科学的理论去指导教学。笔者试图把心理语言学的相关理论引入高职英语听力教...